 by
by
In this control engineering, control theory, and machine learning, we present a Model Predictive Control (MPC) tutorial. First, we explain how to formulate the problem and how to solve it. Finally, we explain how to implement the MPC algorithm in C++ by using the Eigen C++ matrix library. In this tutorial, we consider MPC for linear dynamical systems and we consider the unconstrained case. Also, since this is the first part of a series of tutorials, we assume that the state vector is completely known. In future tutorials, we will develop MPC algorithms when the state is not known. That is, we will integrate an observer with the MPC algorithms. In the first part of this tutorial series, we explained how to implement the MPC algorithm in Python. The first part can be found here. The GitHub page with C++ code files is given here. The YouTube tutorial is given below.
Here is the motivation for creating this video tutorial. Namely, most control engineering classes and teachers focus on MATLAB/Simulink without providing the students and engineers with the necessary knowledge on how to implement in C++ or Python. That is, students rarely have the opportunity to learn real-life implementation of control/estimation algorithms. There is a huge gap between what people learn in undergraduate and graduate programs with what the industry needs and wants. Also, graduate students studying control are focused too much on advanced mathematics and theorem proofs and they rarely have a chance to learn C++ and how to implement algorithms. On the other hand, computer science students have good coding skills. However, they often do not study advanced mathematical concepts necessary to understand control theory and engineering. That is, there is a huge knowledge gap that students need to fill. To be a successful model-based control engineer who will be able to tackle advanced problems one needs to be proficient in control theory and math on one side and in coding on the other side. The free tutorials I am creating aim to fill this knowledge gap.
How to Cite This Document:
“Model Predictive Control (MPC) Tutorial 2: Unconstrained Solution for Linear Systems and Implementation in C++ from Scratch by Using Eigen C++ Library”. Technical Report, Number 3, Aleksandar Haber, (2023), Publisher: www.aleksandarhaber.com, Link: https://aleksandarhaber.com/model-predictive-control-mpc-tutorial-2-unconstrained-solution-for-linear-systems-and-implementation-in-c-from-scratch-by-using-eigen-c-library/
When citing this tutorial and the report, include the link.
Model Predictive Control Formulation
We consider the linear system
(1) 
where  is the state,
is the state,  is the control input,
is the control input,  is the output that we want to control, and
is the output that we want to control, and  and
and  are system matrices. In the current problem formulation, the output
are system matrices. In the current problem formulation, the output  is not necessarily the observed output, that is, it is not necessarily equal to the measured output.
is not necessarily the observed output, that is, it is not necessarily equal to the measured output.
In our problem formulation is actually a set of state variables that should follow a desired reference trajectory. Since this is the first part of the tutorial series on Model Predictive Control (MPC), we will assume that the state vector  is perfectly known. That is, we assume that we have perfectly reconstructed the state vector. In future tutorials, we will consider the case when the state vector is not directly observable. In that case, we will couple a state reconstructor (also known as an observer) with the MPC algorithm.
is perfectly known. That is, we assume that we have perfectly reconstructed the state vector. In future tutorials, we will consider the case when the state vector is not directly observable. In that case, we will couple a state reconstructor (also known as an observer) with the MPC algorithm.
Next, we need to introduce the following notation which is also illustrated in the figure below.
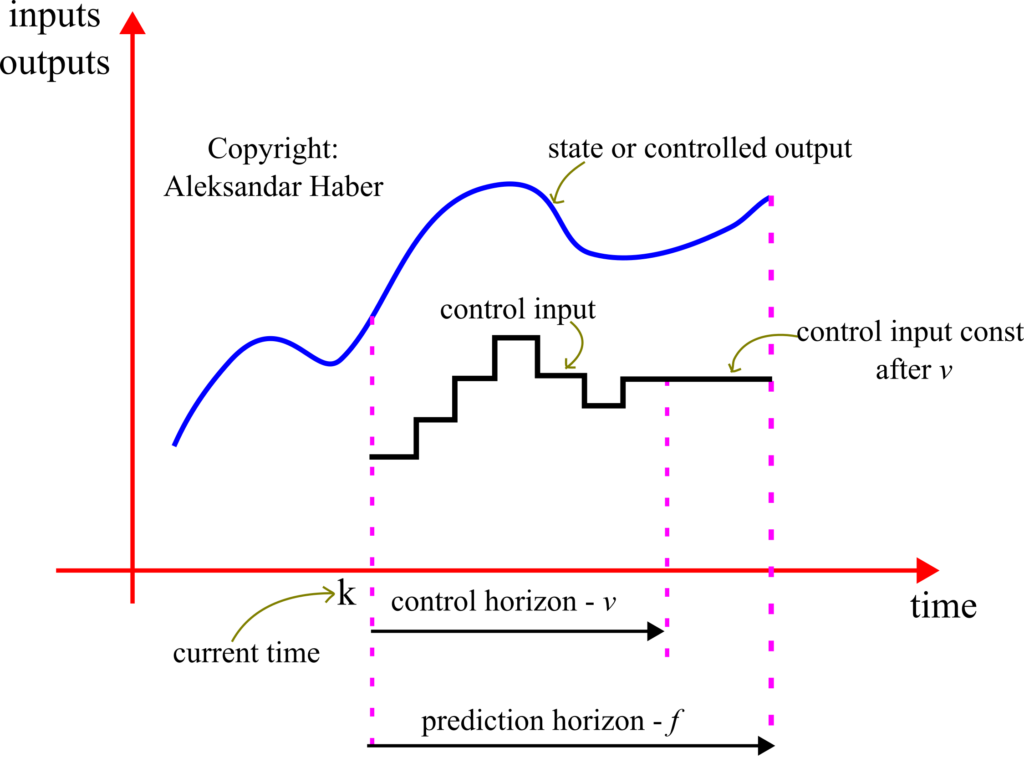
- The length of the prediction horizon is denoted by
 . This is the future prediction horizon over which we will predict the state trajectory behavior. The prediction horizon is selected by the user and in some cases, can also be seen as a tuning parameter.
. This is the future prediction horizon over which we will predict the state trajectory behavior. The prediction horizon is selected by the user and in some cases, can also be seen as a tuning parameter. - The length of the control horizon is denoted by
 . This is the future control horizon over which we allow for the control inputs to change. We introduce the following limitation
. This is the future control horizon over which we allow for the control inputs to change. We introduce the following limitation  . After the control horizon, the control input is kept constant and equal to the last value in the control horizon (this will become clearer in the sequel). The control horizon is selected by the user and in some cases, can also be seen as a tuning parameter.
. After the control horizon, the control input is kept constant and equal to the last value in the control horizon (this will become clearer in the sequel). The control horizon is selected by the user and in some cases, can also be seen as a tuning parameter.  ,
,  is the control input at the time step
is the control input at the time step  and that is computed at the time step
and that is computed at the time step  . This control input is determined as the solution to the MPC problem. Note over here that the control input vector only varies until
. This control input is determined as the solution to the MPC problem. Note over here that the control input vector only varies until  , after that it is constant and equal to
, after that it is constant and equal to  (this will be clarified in the sequel).
(this will be clarified in the sequel). ,
,  is the prediction of the state vector at the time instant and that is made at the time instant .
is the prediction of the state vector at the time instant and that is made at the time instant . , is the prediction of the output vector at the time instant and that is made at the time instant .
, is the prediction of the output vector at the time instant and that is made at the time instant .
The goal of the model predictive controller is to determine a set of control inputs , at the time instant , that will make the output of the system  ,
,  to follow a prescribed output trajectory (desired control trajectory) over the prediction horizon. This is done by using the knowledge of the current state , and the system model matrices
to follow a prescribed output trajectory (desired control trajectory) over the prediction horizon. This is done by using the knowledge of the current state , and the system model matrices  and to predict the output trajectory , , and then to minimize the difference between the desired and predicted trajectories. This will become clearer in the sequel.
and to predict the output trajectory , , and then to minimize the difference between the desired and predicted trajectories. This will become clearer in the sequel.
Let us assume that we are currently at the time instant and that we want to make state and output predictions up to the time instant  . Also, let us assume that the state at the time instant is perfectly known. That is, we assume that is known. From (1) we have for the time instant
. Also, let us assume that the state at the time instant is perfectly known. That is, we assume that is known. From (1) we have for the time instant 
(2) 
Then, by using the last equation, we can write the state and output predictions for the time instant 
(3) 
By using the same principle, for the time instant  , we can write
, we can write
(4) 
The last equation can be written in the compact form
(5) 
By continuing with this procedure until the time index ( is the control horizon), we obtain
(6) 
The index is important mainly because after this index, we have
(7) 
This is a constraint that we impose on our controller. By using this equation, we have for the time index 
(8) 
By using the same procedure and by shifting the time index, we obtain the prediction for the final step
(9) 
The last equation can be written compactly
(10) 
where
(11) 
In the general case, we introduce the following notation for 
(12) 
By combining all the prediction equations in a single equation, we obtain
(13) 
where  is defined in (12) for
is defined in (12) for  and and
and and  is defined (11).
is defined (11).
The last equation can be written compactly as follows
(14) 
where
(15) 
The model predictive control problem can be formulated as follows. The goal is to track a reference output trajectory. Let these desired outputs be denoted by
(16) 
where the superscript “d” means that the outputs are desired outputs. Let the vector  be defined by
be defined by
(17) 
A natural way of formulating the model predictive control problem is to determine the vector of control inputs  , defined in (15), such that the following cost function is minimized
, defined in (15), such that the following cost function is minimized
(18) 
where  is defined in (15). However, the issue with this approach is that we do not have control on the magnitude of control inputs . The control inputs can be extremely large, and thus impossible to be applied in practice, or they can lead to actuator saturation that can lead to devastating effects in a feedback control loop. Consequently, we need to introduce a penalty on the control inputs in the cost function. Furthermore, we need to introduce weights in the cost function (18) to have better control of the convergence of the algorithm.
is defined in (15). However, the issue with this approach is that we do not have control on the magnitude of control inputs . The control inputs can be extremely large, and thus impossible to be applied in practice, or they can lead to actuator saturation that can lead to devastating effects in a feedback control loop. Consequently, we need to introduce a penalty on the control inputs in the cost function. Furthermore, we need to introduce weights in the cost function (18) to have better control of the convergence of the algorithm.
The part of the cost function that will penalize the inputs has the following form
(19) 
where  ,
,  are symmetric weighting matrices selected by the user. The idea for introducing this cost function is to penalize the magnitude of the first applied control input
are symmetric weighting matrices selected by the user. The idea for introducing this cost function is to penalize the magnitude of the first applied control input  and the difference between the subsequent control inputs. The weighting matrices , , are used to penalize these inputs. Next, we need to write the cost function (19) in the vector form. We can do that by introducing the following expression
and the difference between the subsequent control inputs. The weighting matrices , , are used to penalize these inputs. Next, we need to write the cost function (19) in the vector form. We can do that by introducing the following expression
(20) 
The last expression can be written compactly as
(21) 
where
(22) 
and where is defined in (15). We can write the cost function (19) as follows
(23) 
where
(24) 
The matrix  is a block diagonal matrix with the block matrices , , on the main block diagonal.
is a block diagonal matrix with the block matrices , , on the main block diagonal.
Next, we introduce the part of the cost function that corresponds to the tracking error:
(25) 
By introducing
(26) 
where  ,
,  are the symmetric weighting matrices that should be selected by the user. By using (14), (15), (17), and (26), and we can write the cost function as follows
are the symmetric weighting matrices that should be selected by the user. By using (14), (15), (17), and (26), and we can write the cost function as follows
(27) 
where
(28) 
This part of the cost function penalizes the difference between the desired trajectory and the controlled trajectory. Let us analyze the part of the cost function (27). Since it is assumed that the state vector is known, and the desired trajectory vector is given, the vector  defined in (28) can be computed. Our goal is to determine the vector . This vector will be determined by minimizing the cost function
defined in (28) can be computed. Our goal is to determine the vector . This vector will be determined by minimizing the cost function
(29) 
By substituting (23) and (27) in (29), we obtain
(30) 
Next, we need to minimize the cost function (30). To do that, let us write
(31) 
Next, we need to minimize the expression  . We can do that by recalling formulas for the derivative of scalar functions with respect to vectors. Let,
. We can do that by recalling formulas for the derivative of scalar functions with respect to vectors. Let,  be a vector and
be a vector and  a constant vector. Also, let
a constant vector. Also, let  be a constant symmetric matrix. Then, from Chapter 2.4 of the Matrix Cook Book, we have (see equations (69) and (81) from that amazing book)
be a constant symmetric matrix. Then, from Chapter 2.4 of the Matrix Cook Book, we have (see equations (69) and (81) from that amazing book)
(32) 
Then, by using these two equations, we can differentiate all the terms in (31):
(33) 
(34) 
(35) 
(36) 
(37) 
By using (33)-(37), we can compute the derivative of the cost function defined in (31)
(38) 
To find the minimum of the cost function with respect to , we set
(39) 
From where we obtain
(40) 
(41) 
From the last equation, we obtain the solution of the model predictive control problem:
(42) 
It can be shown that this is the solution that actually minimizes the cost function . This can be shown by computing a Hessian matrix and showing that the Hessian matrix is positive definite. The solution  can be expressed as
can be expressed as
(43) 
We only need the first entry, that is  . We apply this input to the system, and we then wait for the time instant , observe the state
. We apply this input to the system, and we then wait for the time instant , observe the state  , and form another cost function for the time instant , compute its solution, and apply
, and form another cost function for the time instant , compute its solution, and apply  to the system, and repeat the procedure for the time instant
to the system, and repeat the procedure for the time instant
The derived model predictive control algorithm can be summarized as follows.
STEP 1: At the time instant , on the basis of the known state vector , and the system matrices  , form the lifted matrices and compute the solution given by (42).
, form the lifted matrices and compute the solution given by (42).
STEP 2: Extract the first entry of this solution and apply it to the system.
STEP 3: Wait for the system to respond and obtain the state measurement . Shift the time index to and go to STEP 1.
Model for Testing the Model Predictive Controller
We consider a mass-spring damper system as a test case for the model predictive controller. The state-space model of this system is derived in our previous tutorial which can be found here. The model is shown in the figure below.
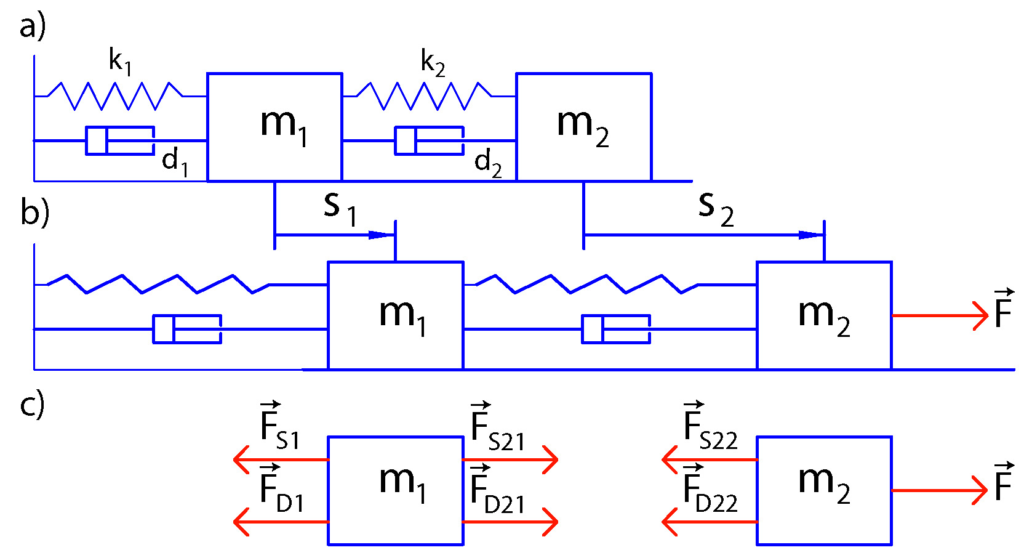
The state-space model has the following form:
(44) 
(45) 
The next step is to transform the state-space model (44)-(45) in the discrete-time domain. Due to its simplicity and good stability properties, we use the Backward Euler method to perform the discretization. This method approximates the state derivative as follows
(46) 
where  is the discretization constant. For simplicity, we assumed that the discrete-time index of the input is
is the discretization constant. For simplicity, we assumed that the discrete-time index of the input is  . We can also assume that the discrete-time index of input is if we want. However, then, when simulating the system dynamics we will start from
. We can also assume that the discrete-time index of input is if we want. However, then, when simulating the system dynamics we will start from  . From the last equation, we have
. From the last equation, we have
(47) 
where  and
and  . On the other hand, the output equation remains unchanged
. On the other hand, the output equation remains unchanged
(48) 
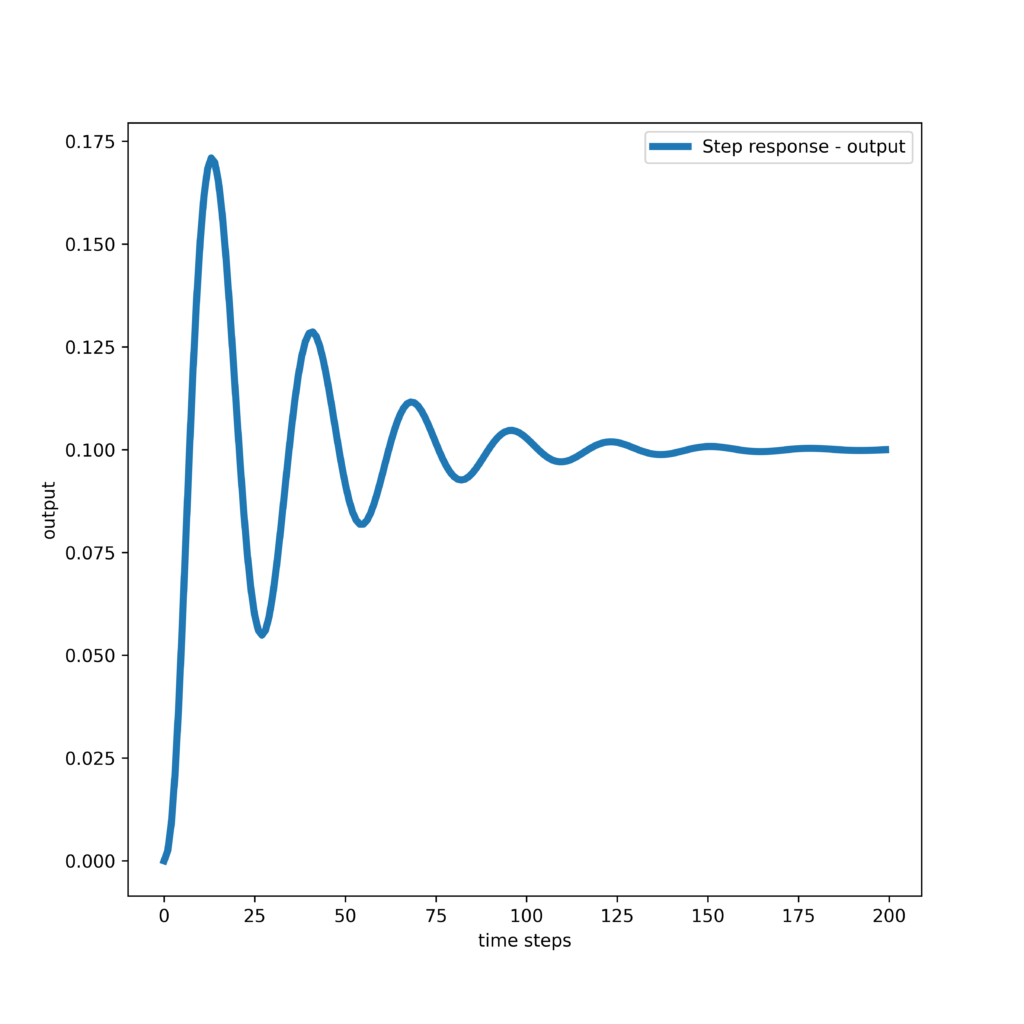
The step response of the system is shown below (the codes are given in the first tutorial part).
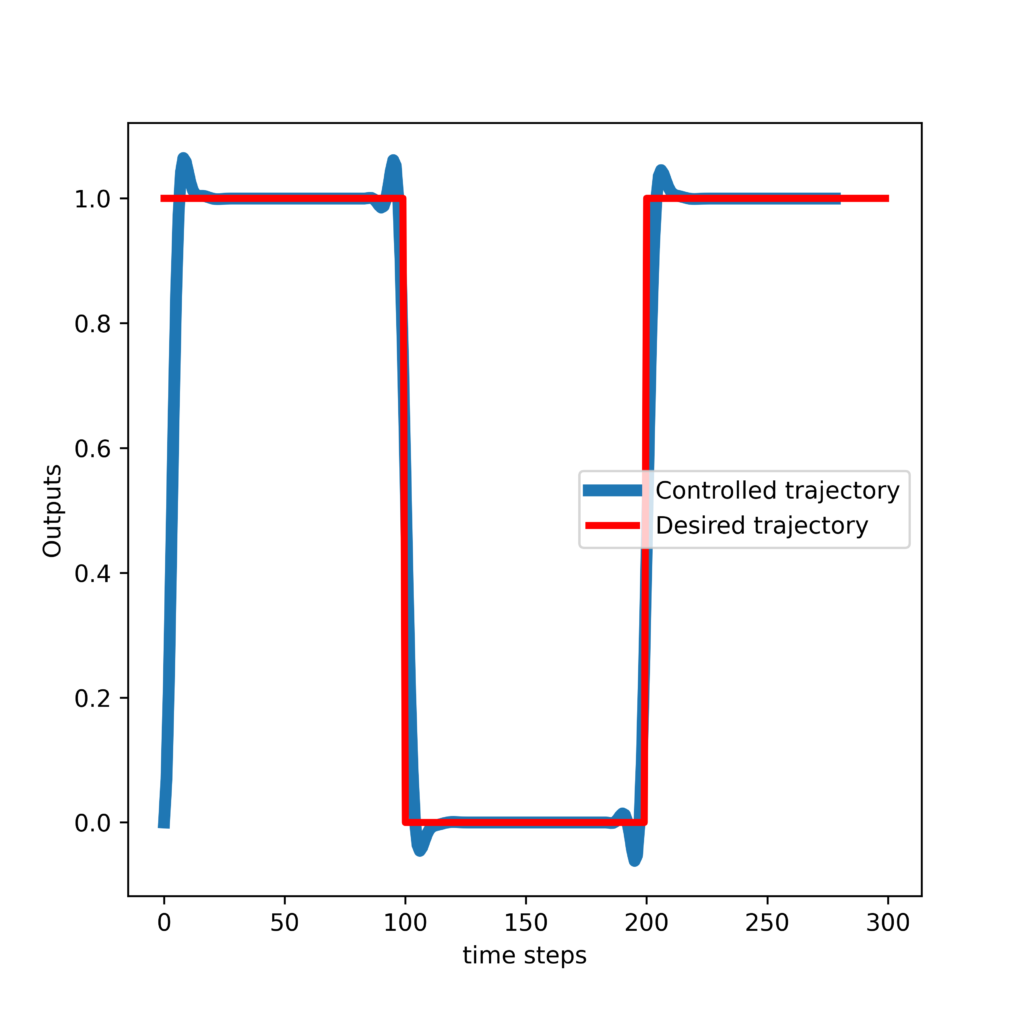
Numerical Results
In this section, we present the numerical results. The C++ codes are given in the next section. We select a reference (desired) trajectory that is a pulse function. The figure below shows the reference trajectory and the response of the model predictive controller.
The figure below shows the computed control inputs.

C++ Implementation of Model Predictive Control Algorithm
The code files presented in this section are available on the GitHub page whose link is given here. The following class implements the Model Predictive Control algorithm in C++. For a detailed explanation of the code, see the YouTube video tutorial at the beginning of this page. First, we give the header file of the class. The code presented below should be saved in the file “ModelPredictiveController.h”.
/*
Model Predictive Control implementation in C++
Author:Aleksandar Haber
Date: September 2023
We implemented a Model Predictive Control (MPC) algorithm in C++ by using the Eigen C++ Matrix library
The description of the MPC algorithm is given in this tutorial:
https://aleksandarhaber.com/model-predictive-control-mpc-tutorial-1-unconstrained-formulation-derivation-and-implementation-in-python-from-scratch/
This is the header file of the Model Predictive Controller class
*/
#ifndef MODELPREDICTIVECONTROLLER_H
#define MODELPREDICTIVECONTROLLER_H
#include<string>
#include<Eigen/Dense>
using namespace Eigen;
using namespace std;
class ModelPredictiveController{
public:
// default constructor - edit this later
ModelPredictiveController();
/*
This constructor will initialize all the private variables,
and it will construct the lifted system matrices O and M,
as well as the control gain matrix necessary to compute the control inputs
*/
// this is the constructor that we use
// Ainput, Binput, Cinput - A,B,C system matrices
// fInput - prediction horizon
// vInput - control horizon
// W3input, W4input - weighting matrices, see the tutorial
// x0Input - x0 initial state of the system
// desiredControlTrajectoryTotalInput - total desired input trajectory
ModelPredictiveController(MatrixXd Ainput, MatrixXd Binput, MatrixXd Cinput,
unsigned int fInput, unsigned int vInput,
MatrixXd W3input, MatrixXd W4input,
MatrixXd x0Input, MatrixXd desiredControlTrajectoryTotalInput);
// this function is used to propagate the dynamics and to compute the solution of the MPC problem
void computeControlInputs();
// this function is used to save the variables as "csv" files
// desiredControlTrajectoryTotalFile - name of the file used to store the trajectory
// inputsFile - name of the file used to store the computed inputs
// statesFile - name of the file used to store the state trajectory
// outputsFile - name of the file used to store the computed outputs - this is the controlled output
// Ofile - name of the file used to store the O lifted matrix - you can use this for diagonostics
// Mfile - name of the file used to store the M lifted matrix - you can use this for diagonostics
void ModelPredictiveController::saveData(string desiredControlTrajectoryTotalFile, string inputsFile,
string statesFile, string outputsFile,string OFile, string MFile) const;
private:
// this variable is used to track the current time step k of the controller
// it is incremented in the function computeControlInputs()
unsigned int k;
// m - input dimension, n- state dimension, r-output dimension
unsigned int m,n,r;
// MatrixXd is an Eigen typdef for Matrix<double, Dynamic, Dynamic>
MatrixXd A,B,C,Q; // system matrices
MatrixXd W3,W4; // weighting matrices
MatrixXd x0; // initial state
MatrixXd desiredControlTrajectoryTotal; // total desired trajectory
unsigned int f,v; // f- prediction horizon, v - control horizon
// we store the state vectors of the controlled state trajectory
MatrixXd states;
// we store the computed inputs
MatrixXd inputs;
// we store the output vectors of the controlled state trajectory
MatrixXd outputs;
// lifted system matrices O and M, computed by the constructor
MatrixXd O;
MatrixXd M;
// control gain matrix, computed by constructor
MatrixXd gainMatrix;
};
#endif
Then, we give the implementation file of the class. The code presented below should be saved in the file “ModelPredictiveController.cpp”.
/*
Model Predictive Control implementation in C++
Author:Aleksandar Haber
Date: September 2023
We implemented a Model Predictive Control (MPC) algorithm in C++ by using the Eigen C++ Matrix library
The description of the MPC algorithm is given in this tutorial:
https://aleksandarhaber.com/model-predictive-control-mpc-tutorial-1-unconstrained-formulation-derivation-and-implementation-in-python-from-scratch/
This is the implementation file of the Model Predictive Controller class
*/
#include <iostream>
#include<tuple>
#include<string>
#include<fstream>
#include<vector>
#include<Eigen/Dense>
#include "ModelPredictiveController.h"
using namespace Eigen;
using namespace std;
// edit this default constructor later
ModelPredictiveController::ModelPredictiveController()
{
}
/*
This constructor will initialize all the private variables,
and it will construct the lifted system matrices O and M,
as well as the control gain matrix necessary to compute the control inputs
*/
// this is the constructor that we use
// Ainput, Binput, Cinput - A,B,C system matrices
// fInput - prediction horizon
// vInput - control horizon
// W3input, W4input - weighting matrices, see the tutorial
// x0Input - x0 initial state of the system
// desiredControlTrajectoryTotalInput - total desired input trajectory
ModelPredictiveController::ModelPredictiveController(
MatrixXd Ainput, MatrixXd Binput, MatrixXd Cinput,
unsigned int fInput, unsigned int vInput,
MatrixXd W3input, MatrixXd W4input,
MatrixXd x0Input, MatrixXd desiredControlTrajectoryTotalInput)
{
A=Ainput; B=Binput; C=Cinput;
f=fInput; v=vInput;
W3=W3input; W4=W4input;
x0=x0Input; desiredControlTrajectoryTotal=desiredControlTrajectoryTotalInput;
// m - input dimension, n- state dimension, r-output dimension
// extract the appropriate dimensions
n = A.rows(); m = B.cols(); r = C.rows();
// this variable is used to track the current time step k of the controller
k=0;
// the trajectory is a column matrix
unsigned int maxSimulationSamples = desiredControlTrajectoryTotal.rows() - f;
// we store the state vectors of the controlled state trajectory
states.resize(n, maxSimulationSamples);
states.setZero();
states.col(0)=x0;
// we store the computed inputs
inputs.resize(m, maxSimulationSamples-1);
inputs.setZero();
// we store the output vectors of the controlled state trajectory
outputs.resize(r, maxSimulationSamples-1);
outputs.setZero();
// we form the lifted system matrices O and M and the gain control matrix
// form the lifted O matrix
O.resize(f*r,n);
O.setZero();
// this matrix is used to store the powers of the matrix A for forming the O matrix
MatrixXd powA;
powA.resize(n,n);
for (int i=0; i<f;i++)
{
if (i == 0)
{
powA=A;
}
else
{
powA=powA*A;
}
O(seq(i*r,(i+1)*r-1),all)=C*powA;
}
// form the lifted M matrix
M.resize(f*r,v*m);
M.setZero();
MatrixXd In;
In= MatrixXd::Identity(n,n);
MatrixXd sumLast;
sumLast.resize(n,n);
sumLast.setZero();
for (int i=0; i<f;i++)
{
// until the control horizon
if(i<v)
{
for (int j=0; j<i+1;j++)
{
if (j==0)
{
powA=In;
}
else
{
powA=powA*A;
}
M(seq(i*r,(i+1)*r-1),seq((i-j)*m,(i-j+1)*m-1))=C*powA*B;
}
}
// from the control horizon until the prediction horizon
else
{
for(int j=0;j<v;j++)
{
if (j==0)
{
sumLast.setZero();
for (int s=0;s<i+v+2;s++)
{
if (s == 0)
{
powA=In;
}
else
{
powA=powA*A;
}
sumLast=sumLast+powA;
}
M(seq(i*r,(i+1)*r-1),seq((v-1)*m,(v)*m-1))=C*sumLast*B;
}
else
{
powA=powA*A;
M(seq(i*r,(i+1)*r-1),seq((v-1-j)*m,(v-j)*m-1))=C*powA*B;
}
}
}
}
MatrixXd tmp;
tmp.resize(v*m,v*m);
tmp=M.transpose()*W4*M+W3;
gainMatrix=(tmp.inverse())*(M.transpose())*W4;
}
// this function propagates the dynamics
// and computes the control inputs by solving the model predictive control problem
void ModelPredictiveController::computeControlInputs()
{
// # extract the segment of the desired control trajectory
MatrixXd desiredControlTrajectory;
desiredControlTrajectory=desiredControlTrajectoryTotal(seq(k,k+f-1),all);
//# compute the vector s
MatrixXd vectorS;
vectorS=desiredControlTrajectory-O*states.col(k);
//# compute the control sequence
MatrixXd inputSequenceComputed;
inputSequenceComputed=gainMatrix*vectorS;
// extract the first entry that is applied to the system
inputs.col(k)=inputSequenceComputed(seq(0,m-1),all);
// propagate the dynamics
states.col(k+1)=A*states.col(k)+B*inputs.col(k);
outputs.col(k)=C*states.col(k);
//increment the index
k=k+1;
}
// this function is used to save the variables as "csv" files
// desiredControlTrajectoryTotalFile - name of the file used to store the trajectory
// inputsFile - name of the file used to store the computed inputs
// statesFile - name of the file used to store the state trajectory
// outputsFile - name of the file used to store the computed outputs - this is the controlled output
// Ofile - name of the file used to store the O lifted matrix - you can use this for diagonostics
// Mfile - name of the file used to store the M lifted matrix - you can use this for diagonostics
void ModelPredictiveController::saveData(string desiredControlTrajectoryTotalFile, string inputsFile,
string statesFile, string outputsFile, string OFile, string MFile) const
{
const static IOFormat CSVFormat(FullPrecision, DontAlignCols, ", ", "\n");
ofstream file1(desiredControlTrajectoryTotalFile);
if (file1.is_open())
{
file1 << desiredControlTrajectoryTotal.format(CSVFormat);
file1.close();
}
ofstream file2(inputsFile);
if (file2.is_open())
{
file2 << inputs.format(CSVFormat);
file2.close();
}
ofstream file3(statesFile);
if (file3.is_open())
{
file3 << states.format(CSVFormat);
file3.close();
}
ofstream file4(outputsFile);
if (file4.is_open())
{
file4 << outputs.format(CSVFormat);
file4.close();
}
ofstream file5(OFile);
if (file5.is_open())
{
file5 << O.format(CSVFormat);
file5.close();
}
ofstream file6(MFile);
if (file6.is_open())
{
file6 << M.format(CSVFormat);
file6.close();
}
}
Finally, the driver code for the class is given below.
/*
Model Predictive Control implementation in C++
Author:Aleksandar Haber
Date: September 2023
We implemented a Model Predictive Control (MPC) algorithm in C++ by using the Eigen C++ Matrix library
The description of the MPC algorithm is given in this tutorial:
https://aleksandarhaber.com/model-predictive-control-mpc-tutorial-1-unconstrained-formulation-derivation-and-implementation-in-python-from-scratch/
This is the driver code that explains how to use the Model Predictive Controller class
and that solves the MPC problem
*/
#include <iostream>
#include<Eigen/Dense>
#include "ModelPredictiveController.h"
#include "ModelPredictiveController.cpp"
using namespace Eigen;
using namespace std;
int main()
{
//###############################################################################
//# Define the MPC algorithm parameters
//###############################################################################
// prediction horizon
unsigned int f=20;
// control horizon
unsigned int v=18;
//###############################################################################
//# end of MPC parameter definitions
//###############################################################################
//###############################################################################
//# Define the model - continious time
//###############################################################################
//# masses, spring and damper constants
double m1=2 ; double m2=2 ; double k1=100 ; double k2=200 ; double d1=1 ; double d2=5;
//# define the continuous-time system matrices and initial condition
Matrix <double,4,4> Ac {{0, 1, 0, 0},
{-(k1+k2)/m1 , -(d1+d2)/m1 , k2/m1 , d2/m1},
{0 , 0 , 0 , 1},
{k2/m2, d2/m2, -k2/m2, -d2/m2}};
Matrix <double,4,1> Bc {{0},{0},{0},{1/m2}};
Matrix <double,1,4> Cc {{1,0,0,0}};
Matrix <double,4,1> x0 {{0},{0},{0},{0}};
// m- number of inputs
// r - number of outputs
// n - state dimension
unsigned int n = Ac.rows(); unsigned int m = Bc.cols(); unsigned int r = Cc.rows();
//###############################################################################
//# end of model definition
//###############################################################################
//###############################################################################
//# discretize the model
//###############################################################################
//# discretization constant
double sampling=0.05;
// # model discretization
// identity matrix
MatrixXd In;
In= MatrixXd::Identity(n,n);
MatrixXd A;
MatrixXd B;
MatrixXd C;
A.resize(n,n);
B.resize(n,m);
C.resize(r,n);
A=(In-sampling*Ac).inverse();
B=A*sampling*Bc;
C=Cc;
//###############################################################################
//# end of discretize the model
//###############################################################################
//###############################################################################
//# form the weighting matrices
//###############################################################################
//# W1 matrix
MatrixXd W1;
W1.resize(v*m,v*m);
W1.setZero();
MatrixXd Im;
Im= MatrixXd::Identity(m,m);
for (int i=0; i<v;i++)
{
if (i==0)
{
W1(seq(i*m,(i+1)*m-1),seq(i*m,(i+1)*m-1))=Im;
}
else
{
W1(seq(i*m,(i+1)*m-1),seq(i*m,(i+1)*m-1))=Im;
W1(seq(i*m,(i+1)*m-1),seq((i-1)*m,(i)*m-1))=-Im;
}
}
//# W2 matrix
double Q0=0.0000000011;
double Qother=0.0001;
MatrixXd W2;
W2.resize(v*m,v*m);
W2.setZero();
for (int i=0; i<v; i++)
{
if (i==0)
{
// this is for multivariable
//W2(seq(i*m,(i+1)*m-1),seq(i*m,(i+1)*m-1))=Q0;
W2(i*m,i*m)=Q0;
}
else
{
// this is for multivariable
//W2(seq(i*m,(i+1)*m-1),seq(i*m,(i+1)*m-1))=Qother;
W2(i*m,i*m)=Qother;
}
}
MatrixXd W3;
W3=(W1.transpose())*W2*W1;
MatrixXd W4;
W4.resize(f*r,f*r);
W4.setZero();
// # in the general case, this constant should be a matrix
double predWeight=10;
for (int i=0; i<f;i++)
{
//this is for multivariable
//W4(seq(i*r,(i+1)*r-1),seq(i*r,(i+1)*r-1))=predWeight;
W4(i*r,i*r)=predWeight;
}
//###############################################################################
//# end of form the weighting matrices
//###############################################################################
//###############################################################################
//# Define the reference trajectory
//###############################################################################
unsigned int timeSteps=300;
//# pulse trajectory
MatrixXd desiredTrajectory;
desiredTrajectory.resize(timeSteps,1);
desiredTrajectory.setZero();
MatrixXd tmp1;
tmp1=MatrixXd::Ones(100,1);
desiredTrajectory(seq(0,100-1),all)=tmp1;
desiredTrajectory(seq(200,timeSteps-1),all)=tmp1;
//###############################################################################
//# end of definition of the reference trajectory
//###############################################################################
//###############################################################################
//# Run the MPC algorithm
//###############################################################################
// create the MPC object
ModelPredictiveController mpc(A, B, C,
f, v,W3,W4,x0,desiredTrajectory);
// this is the main control loop
for (int index1=0; index1<timeSteps-f-1; index1++)
{
mpc.computeControlInputs();
}
// save the computed vectors and matrices
// saveData(string desiredControlTrajectoryTotalFile, string inputsFile,
// string statesFile, string outputsFile)
mpc.saveData("trajectory.csv", "computedInputs.csv",
"states.csv", "outputs.csv","Omatrix.csv","Mmatrix.csv");
cout<<"MPC simulation completed and data saved!"<<endl;
return 0;
}
By running this driver code, several comma-separated value (csv) files will be generated. These files store the computed inputs, outputs, and states, as well as the reference (desired) trajectory and the lifted system matrices  and
and  . These files are loaded by the Python script given below. This python script plots the results that are given in the previous section.
. These files are loaded by the Python script given below. This python script plots the results that are given in the previous section.
# -*- coding: utf-8 -*-
"""
/*
Model Predictive Control implementation in C++
Author:Aleksandar Haber
Date: September 2023
We implemented a Model Predictive Control (MPC) algorithm in C++ by using the Eigen C++ Matrix library
The description of the MPC algorithm is given in this tutorial:
https://aleksandarhaber.com/model-predictive-control-mpc-tutorial-1-unconstrained-formulation-derivation-and-implementation-in-python-from-scratch/
This is the Python file used to visualize the results
and to save the graphs
This file will load the saved matrices and vectors.
After that, it will generate the graphs
*/
"""
import numpy as np
import matplotlib.pyplot as plt
# Load the matrices and vectors from csv files
# computed control inputs
cppInputs = np.loadtxt("computedInputs.csv", delimiter=",")
# controlled state trajectory
cppStates = np.loadtxt("states.csv", delimiter=",")
# computed outputs
cppOutputs= np.loadtxt("outputs.csv", delimiter=",")
# reference (desired) trajectory
cppTrajectory= np.loadtxt("trajectory.csv", delimiter=",")
# lifted O matrix
Omatrix=np.loadtxt("Omatrix.csv", delimiter=",")
# lifted M matrix
Mmatrix=np.loadtxt("Mmatrix.csv", delimiter=",")
# plot the results
plt.figure(figsize=(6,6))
plt.plot(cppOutputs,linewidth=5, label='Controlled trajectory')
plt.plot(cppTrajectory,'r', linewidth=3, label='Desired trajectory')
plt.xlabel('time steps')
plt.ylabel('Outputs')
plt.legend()
plt.savefig('controlledOutputsPulseCpp.png',dpi=600)
plt.show()
plt.figure(figsize=(6,6))
plt.plot(cppInputs,linewidth=4, label='Computed inputs')
plt.xlabel('time steps')
plt.ylabel('Input')
plt.legend()
plt.savefig('inputsPulseCpp.png',dpi=600)
plt.show()