 by
by
In this control engineering and control theory tutorial, we will learn how to numerically check observability of a dynamical system in Python. We will consider both continuous-time and discrete-time systems. In our previous video tutorial, whose link is given here, we introduced the concept of observability. Before reading the tutorial presented below, it is suggested that you go over that tutorial. By reading that tutorial you will obtain a proper understanding of observability of dynamical systems.
The main motivation for creating this video tutorial comes from the fact that in many control engineering books, as well as in lectures available online, you can read that observability of the system is tested by testing the rank of the observability matrix. From a purely theoretical point of view, this is the correct approach for testing observability of linear dynamical systems. The issue with this approach is that in practice, it might happen that the observability matrix has full rank, however, it might be numerically ill-conditioned or very close to a matrix without full rank. That is, it might happen that even if the rank condition for testing observability is satisfied, from the numerical point of view the considered system is unobservable or poorly observable. The correct approach for testing observability is not only to check the matrix rank but also to analyze singular values of the observability matrix. In this tutorial, you will learn how to correctly analyze observability of a linear dynamical system and how to perform numerical observability tests in Python. In this video tutorial, we consider three cases
- Observable system
- Structurally unobservable system
- A system whose observability is parametrized and enables us to demonstrate the transition from the unobservable to the observable system
The YouTube tutorial accompanying this webpage is given below.
Brief Summary of Observability For Continuous-Time Systems
Briefly speaking, the system is observable if and only if we can uniquely reconstruct the system’s (initial) state from the output measurements. We consider a continuous-time linear dynamical system having the following state-space form
(1) 
where
 is the
is the  -dimensional state of the system
-dimensional state of the system - is the state dimension or the order of the system
 is the
is the  -dimensional output of the system. This vector is also known as the observed output.
-dimensional output of the system. This vector is also known as the observed output. is the
is the  -dimensional input of the system. This vector is also known as the control input.
-dimensional input of the system. This vector is also known as the control input. ,
,  , and
, and  are the system matrices.
are the system matrices.
Formally speaking, the system is observable if and only if the  step observability matrix
step observability matrix  has full column rank. That is, if and only if
has full column rank. That is, if and only if
(2) 
where is the steps observability matrix defined as follows
(3) 
Brief Summary of Observability For Discrete-Time Systems
Here, we will summarize the formal observability rank condition for discrete-time systems. This condition is derived in our previous tutorial whose link is given here. We consider a discrete-time linear dynamical system having the following state-space form
(4) 
where
 is the -dimensional state of the system at the discrete-time instant
is the -dimensional state of the system at the discrete-time instant 
- is the state dimension or the order of the system
 is the -dimensional output of the system at the discrete-time instant . This vector is also known as the observed output.
is the -dimensional output of the system at the discrete-time instant . This vector is also known as the observed output. is the -dimensional input of the system at the discrete-time instant . This vector is also known as the control input.
is the -dimensional input of the system at the discrete-time instant . This vector is also known as the control input. ,
,  , and
, and  are discrete-time system matrices.
are discrete-time system matrices.
The observability condition for the discrete-time system has an identical form to the observability condition for the continuous-time systems. Formally speaking, the discrete-time system is observable if and only if the step observability matrix  has full column rank. That is, if and only if
has full column rank. That is, if and only if
(5) 
where is the steps discrete-time observability matrix defined as follows
(6) 
Correct Numerical Test for Testing Observability
From the previous two sections, we have seen that in order to test observability we need to compute the rank of the observability matrix. From a purely theoretical point of view, this is the correct approach for testing observability of linear dynamical systems. The issue with this approach is that in practice, it might happen that the observability matrix has full rank, however, it might be numerically ill-conditioned or very close to a matrix without full rank. That is, it might happen that even if the rank condition for testing observability is satisfied, from the numerical point of view the considered system is unobservable or poorly observable. The correct approach for testing observability is not only to check the matrix rank but also to analyze singular values of the observability matrix.
That is, to truly test observability of a dynamical system, we need to augment the rank test with the analysis of singular values of the observability matrix. The singular values are computed by performing the singular value decomposition:
(7) 
where  and
and  are orthogonal matrices and
are orthogonal matrices and  is the rectangular diagonal matrix (not exactly the square diagonal matrix, instead, it contains a block matrix that is a square diagonal matrix). The matrix contains singular values that are ordered from the largest one to the smallest one. That is, by computing the singular value decomposition, we compute the singular values of the observability matrix.
is the rectangular diagonal matrix (not exactly the square diagonal matrix, instead, it contains a block matrix that is a square diagonal matrix). The matrix contains singular values that are ordered from the largest one to the smallest one. That is, by computing the singular value decomposition, we compute the singular values of the observability matrix.
The maximum and minimum singular values of the observability matrix can tell us a lot about the practical observability of the system. If the ratio of the largest and smallest singular values is not large, then we can conclude that the system is numerically observable. On the other hand, if the ratio of the largest and smallest singular values is very large (for example in the order of  or even larger), then from the practical point of view, the system is not observable. The ratio of the maximum and minimum singular value of a matrix is called the condition number. That is, if the condition number is not large, then the system is numerically observable. On the other hand, if the condition number is large, the system is not numerically observable.
or even larger), then from the practical point of view, the system is not observable. The ratio of the maximum and minimum singular value of a matrix is called the condition number. That is, if the condition number is not large, then the system is numerically observable. On the other hand, if the condition number is large, the system is not numerically observable.
Also, the smallest singular value can be used to test the observability. If the smallest singular value of the observability matrix is close to zero or equal to a very small number, then from the practical point of view the system is not observable. In contrast, if the smallest singular value is not a very small number, then from the practical point of view, the system is observable.
Observability Test in Python – Case I – Observable System
First, we consider an observable system. We consider a mass-spring-damper system shown in the figure below:
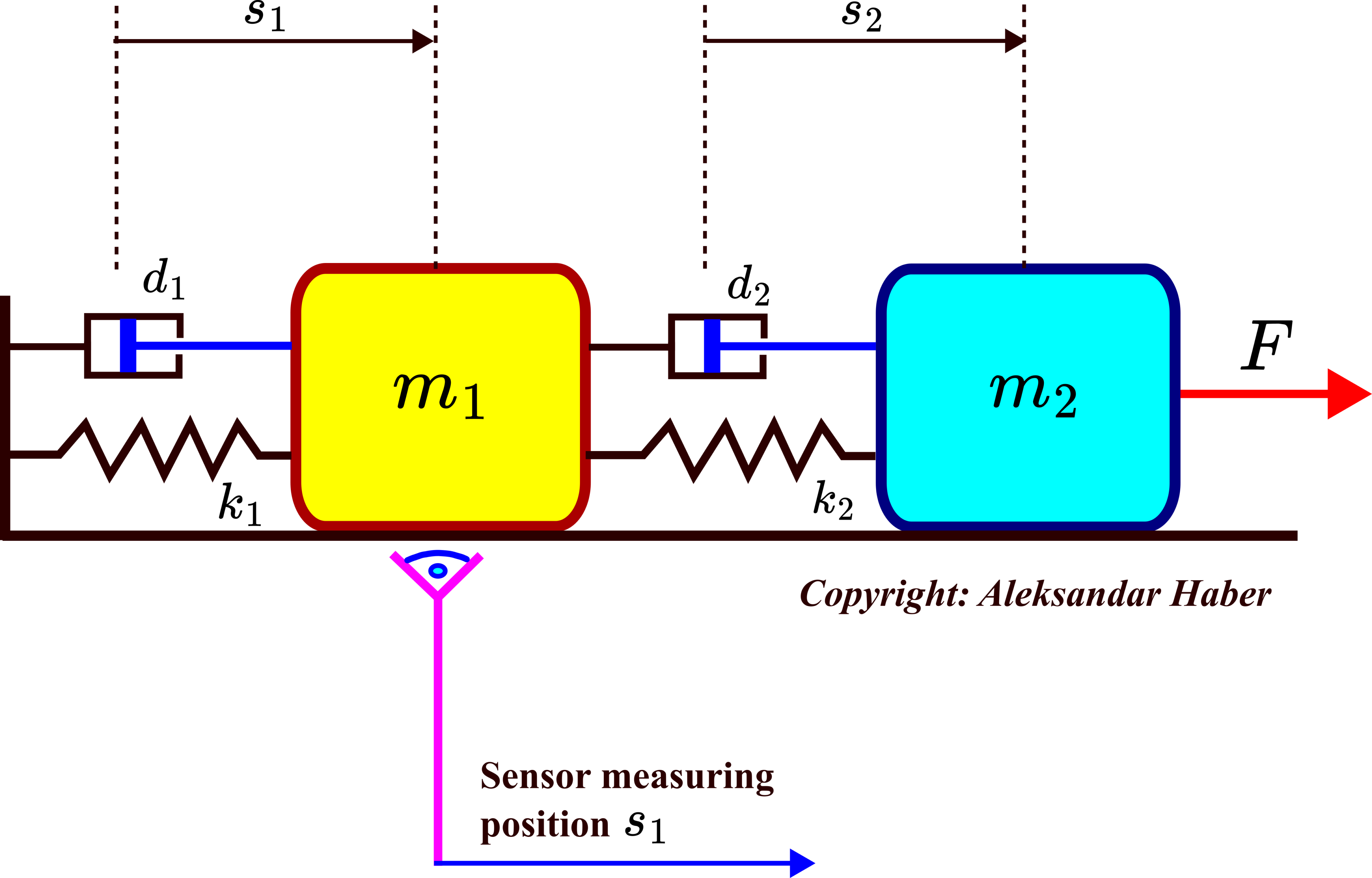
This system consists of two objects that are connected by springs and dampers. This is a prototypical system that can be used to model a large number of dynamical systems, such as mechanical systems exhibiting oscillating behavior, robotic links, car suspension systems, etc. The mass of object 1 is  . The mass of object two is
. The mass of object two is  . The parameters
. The parameters  and
and  are spring constants of the first and second springs. The parameters
are spring constants of the first and second springs. The parameters  and
and  are damping constants of the first and second damper. The force
are damping constants of the first and second damper. The force  is the external control force applied to the system. The position of the first and second objects are denoted by
is the external control force applied to the system. The position of the first and second objects are denoted by  and
and  , respectively. The velocities of the first and second objects are denoted by
, respectively. The velocities of the first and second objects are denoted by  and
and  , respectively.
, respectively.
We assume that there is a sensor measuring the position of the first object. That is, we assume that is directly observed. We derived a state-space model of this system in our previous tutorial given here. The state-space variables are selected as follows
(8) 
The state vector is defined as follows
(9) 
The state-space model is given below (for the explanation, see the tutorial whose link is given here):
(10) 
where
(11) 
The following Python code is used to test observability of this system
# -*- coding: utf-8 -*-
"""
Observability test in Python
Author: Aleksandar Haber
Date: November 2023
CASE I: Observable System
"""
import numpy as np
###############################################################################
# function that creates the observability matrix
###############################################################################
def observabilityMatrix(Ain,Cin):
(r,n)=Cin.shape
ObsMatrix=np.zeros(shape=(r*n,n))
powerA=np.eye(n,n)
for i in range(n):
ObsMatrix[r*i:r*(i+1),:]=np.matmul(Cin,powerA)
powerA=np.matmul(powerA,Ain)
return ObsMatrix
###############################################################################
###############################################################################
# Case I - Observable System
###############################################################################
# define the system parameters
m1=2 ; m2=3 ; k1=100 ; k2=200 ; d1=1 ; d2=5;
# define the continuous-time system matrices
A=np.array([[0, 1, 0, 0],
[-(k1+k2)/m1 , -(d1+d2)/m1 , k2/m1 , d2/m1 ],
[0 , 0 , 0 , 1],
[k2/m2, d2/m2, -k2/m2, -d2/m2]])
B=np.array([[0],[0],[0],[1/m2]])
C=np.array([[1, 0, 0, 0]])
D=np.array([[0]])
obsM=observabilityMatrix(A,C)
# check the rank
np.linalg.matrix_rank(obsM)
#compute the singular value decomposition
# of the observability matrix
U,S,V=np.linalg.svd(obsM)
# compute the singular value decomposition
# first approach
print(np.linalg.cond(obsM))
#second approach
print(S.max()/S.min())
The Python script presented above first defines a function for creating the observability matrix. Then, it creates the system matrices. We use the NumPy function “np.linalg.matrix_rank” to test the rank of the observability matrix. As expected, the matrix rank is equal to 4. This means that the system is observable since the order of the system is equal to  . Then, we investigate practical observability of the system by computing the singular value decomposition of the observability matrix. Finally, we compute the condition number of the observability matrix. The computer condition number is
. Then, we investigate practical observability of the system by computing the singular value decomposition of the observability matrix. Finally, we compute the condition number of the observability matrix. The computer condition number is  . Since this condition number is not large, that is, it is not in the order of or in the order of a larger number, we conclude that the system is practically observable.
. Since this condition number is not large, that is, it is not in the order of or in the order of a larger number, we conclude that the system is practically observable.
Next, to illustrate that the condition number is a good measure of the system’s observability, we add an additional observed output to our system. That is, besides the state variable  (position of the first object), we also assume that the state variable
(position of the first object), we also assume that the state variable  is observed (position of the second object). We expect that after this modification, the system will become more observable since we can observe an additional state variable, and consequently, it will be easier to reconstruct the complete state vector by using two directly observed state variables. The Python script given below performs this modification and tests observability.
is observed (position of the second object). We expect that after this modification, the system will become more observable since we can observe an additional state variable, and consequently, it will be easier to reconstruct the complete state vector by using two directly observed state variables. The Python script given below performs this modification and tests observability.
# now change the matrix C
Cnew=np.array([[1, 0, 1, 0]])
obsMnew=observabilityMatrix(A,Cnew)
# check the rank
np.linalg.matrix_rank(obsMnew)
#compute the singular value decomposition
# of the observability matrix
Unew,Snew,Vnew=np.linalg.svd(obsMnew)
# compute the condition number
# first approach
print(np.linalg.cond(obsMnew))
#second approach
print(Snew.max()/Snew.min())
The condition number of the modified observability matrix is  . We can observe that the condition number decreased compared to the previous case. As expected, this implies that the modified system is more observable than the first system.
. We can observe that the condition number decreased compared to the previous case. As expected, this implies that the modified system is more observable than the first system.
Observability Test in Python – Case II – Unobservable System
Here, we perform tests on an unobservable system. We consider the following system
(12) 
where
(13) 
where  are two
are two  by random matrices. The system is not observable due to the following two reasons
by random matrices. The system is not observable due to the following two reasons
- The complete system can be seen as the coupling of two second-order systems that are decoupled. The dynamics of the first system is described by the matrix
 and the dynamics of the second system is described by
and the dynamics of the second system is described by  . The matrix
. The matrix  is a block diagonal matrix which means that two systems are decoupled.
is a block diagonal matrix which means that two systems are decoupled. - We are only measuring the state of the first system. That is, the matrix
 has one only at the first position.
has one only at the first position.
The Python script is given below.
"""
Observability test in Python
Author: Aleksandar Haber
Date: November 2023
CASE 2: Unobservable system
"""
import numpy as np
###############################################################################
# function that creates the observability matrix
###############################################################################
def observabilityMatrix(Ain,Cin):
(r,n)=Cin.shape
ObsMatrix=np.zeros(shape=(r*n,n))
powerA=np.eye(n,n)
for i in range(n):
ObsMatrix[r*i:r*(i+1),:]=np.matmul(Cin,powerA)
powerA=np.matmul(powerA,Ain)
return ObsMatrix
###############################################################################
###############################################################################
# Case II - Unobservable System
###############################################################################
# create two decoupled systems
A2=np.zeros(shape=(4,4))
A2[0:2,0:2]=np.random.randn(2,2)
A2[2:4,2:4]=np.random.randn(2,2)
C2=np.array([[1, 0, 0, 0]])
obsMnew2=observabilityMatrix(A2,C2)
# check the rank
np.linalg.matrix_rank(obsMnew2)
#compute the singular value decomposition
# of the observability matrix
Unew2,Snew2,Vnew2=np.linalg.svd(obsMnew2)
# compute the singular value decomposition
# first approach
print(np.linalg.cond(obsMnew2))
#second approach
print(Snew2.max()/Snew2.min())The A matrix of this system is
array([[-0.58458549, 0.50254489, 0. , 0. ],
[-0.75027269, 0.11005184, 0. , 0. ],
[ 0. , 0. , 0.89584881, -0.48266915],
[ 0. , 0. , -0.57567866, -0.49096135]])We can see that the system consists of two decouples second order system. The C matrix of this system is
array([[1, 0, 0, 0]])This C matrix tells us that only the first state variable of the first system is measured. This means that we do not have any information about the states of the second system.
The rank of the observability matrix is equal to 2 . Consequently, the system is not observable. The condition number is infinity since the smallest singular value is equal to 0. That is, the matrix is rank deficient.
Observability Test in Python – Case III – Transition from Unobservable to Observable System
In this case, we parametrize the system output, and we explain how the introduced parameter influences the system observability. We consider the system from Case II given by equations (12) and (13), with one important difference. The output matrix looks like this
(14) 
where  is a parameter that we vary. By varying this parameter from
is a parameter that we vary. By varying this parameter from  to a larger number, we will have the transition from unobservable to observable systems. We will show that the condition number decreases as the number increases. This means that the system becomes more observable as the parameter delta is increased.
to a larger number, we will have the transition from unobservable to observable systems. We will show that the condition number decreases as the number increases. This means that the system becomes more observable as the parameter delta is increased.
The Python script is given below.
"""
Observability test in Python
Author: Aleksandar Haber
Date: November 2023
CASE 3: Transition from unobservable to observable system
"""
import numpy as np
###############################################################################
# function that creates the observability matrix
###############################################################################
def observabilityMatrix(Ain,Cin):
(r,n)=Cin.shape
ObsMatrix=np.zeros(shape=(r*n,n))
powerA=np.eye(n,n)
for i in range(n):
ObsMatrix[r*i:r*(i+1),:]=np.matmul(Cin,powerA)
powerA=np.matmul(powerA,Ain)
return ObsMatrix
###############################################################################
###############################################################################
# Case III - Transition from Unobservable to Observable
###############################################################################
# create two decoupled systems
A2=np.zeros(shape=(4,4))
A2[0:2,0:2]=np.random.randn(2,2)
A2[2:4,2:4]=np.random.randn(2,2)
delta=0.00000001
C2=np.array([[1, 0, delta, 0]])
obsMnew2=observabilityMatrix(A2,C2)
# check the rank
np.linalg.matrix_rank(obsMnew2)
#compute the singular value decomposition
# of the observability matrix
Unew2,Snew2,Vnew2=np.linalg.svd(obsMnew2)
# compute the singular value decomposition
# first approach
print(np.linalg.cond(obsMnew2))
#second approach
print(Snew2.max()/Snew2.min())
For delta=0, the system is not observable and the rank of the observability matrix is . The condition number is infinity. For delta=0.0000000001, the rank of the observability matrix is 4. However, the condition number is a very large number equal to 54188379445. Despite the fact that the rank of the observability matrix is 4, since the condition number is large, this means that the system is not practically observable. For delta=0.00001, the rank of the observability matrix is 4. The condition number is 1143673. Since this number is not extremely large, we can conclude that the system is numerically observable.