 by
by
Consider a robotic manipulator with two degrees of freedom shown in the figure.
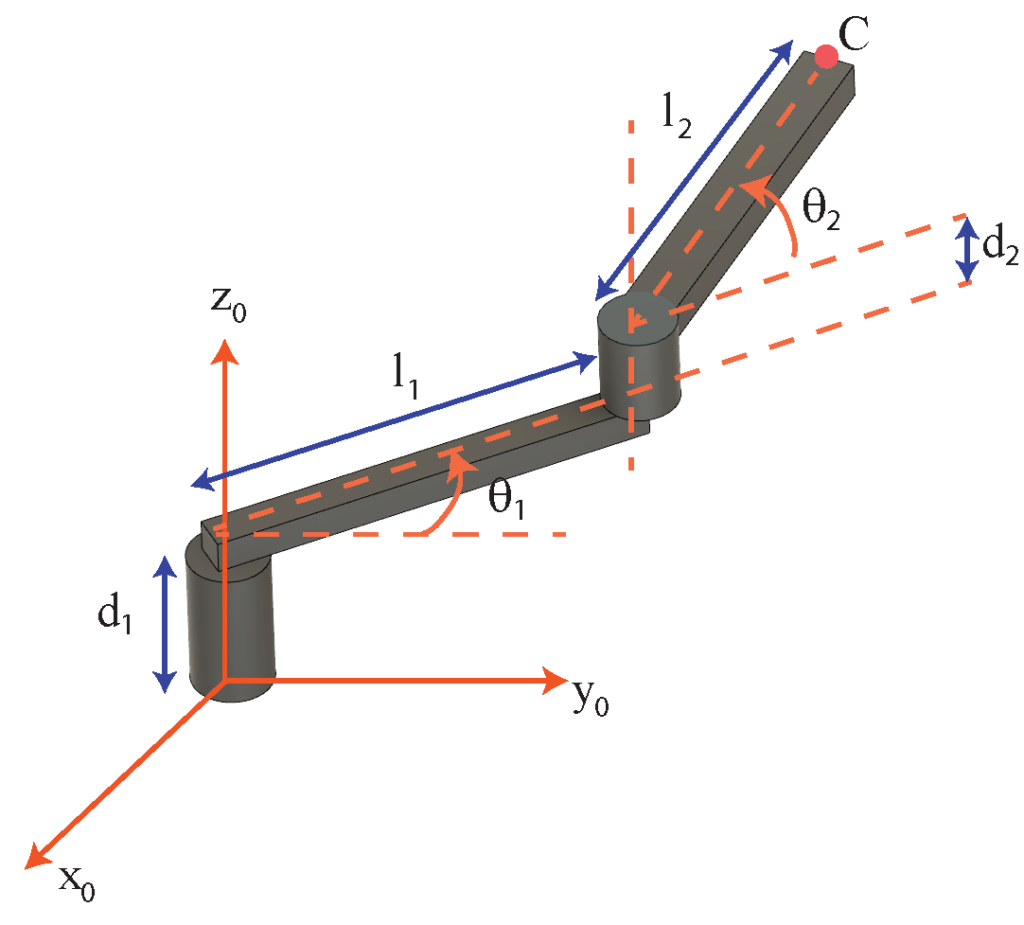
The manipulator can rotate around axis  for the angle of
for the angle of  and around the axis
and around the axis  for the angle of
for the angle of  . Assume that , , distances
. Assume that , , distances  and
and  are given.
are given.
Your task is to
- Assign coordinate systems to every joint.
- Construct rotation matrices and homogeneous transform.
- Represent the coordinates of the end-effector point
 in the base coordinate system
in the base coordinate system  by using rotation matrices and homogeneous transforms.
by using rotation matrices and homogeneous transforms.
Important notes:
- The submission deadline is Friday, January 28, at 12:00PM, during the class. Only printed copies will be accepted. Please do not email the homework assignments.
- You are expected to write equations, text, and graphs in appropriate software. Hand-written homework assignments will not be accepted. Latex software is a good option for writting the homework assignment, see for example the online tutorial given below.
- Plagiarism will not be tolerated.