 by
by
In this post, we explain
- The basics of phase portraits of dynamical systems and state-space models.
- How to plot phase portraits in Python
A YouTube video accompanying this tutorial is given below.
The GitHub page with the codes presented in this tutorial is given here. Besides this tutorial, we created a tutorial on how to generate phase portraits of dynamical systems in MATLAB. The MATLAB tutorial is given here.
Basics of Phase Portraits of Dynamical Systems
For example, consider the following dynamical system:
(1) 
This is a state-space model a dynamical system with two state-space variables  and
and  . In this tutorial, you will learn how to generate a phase portrait of this system in Python. The phase portrait is shown in the figure below.
. In this tutorial, you will learn how to generate a phase portrait of this system in Python. The phase portrait is shown in the figure below.
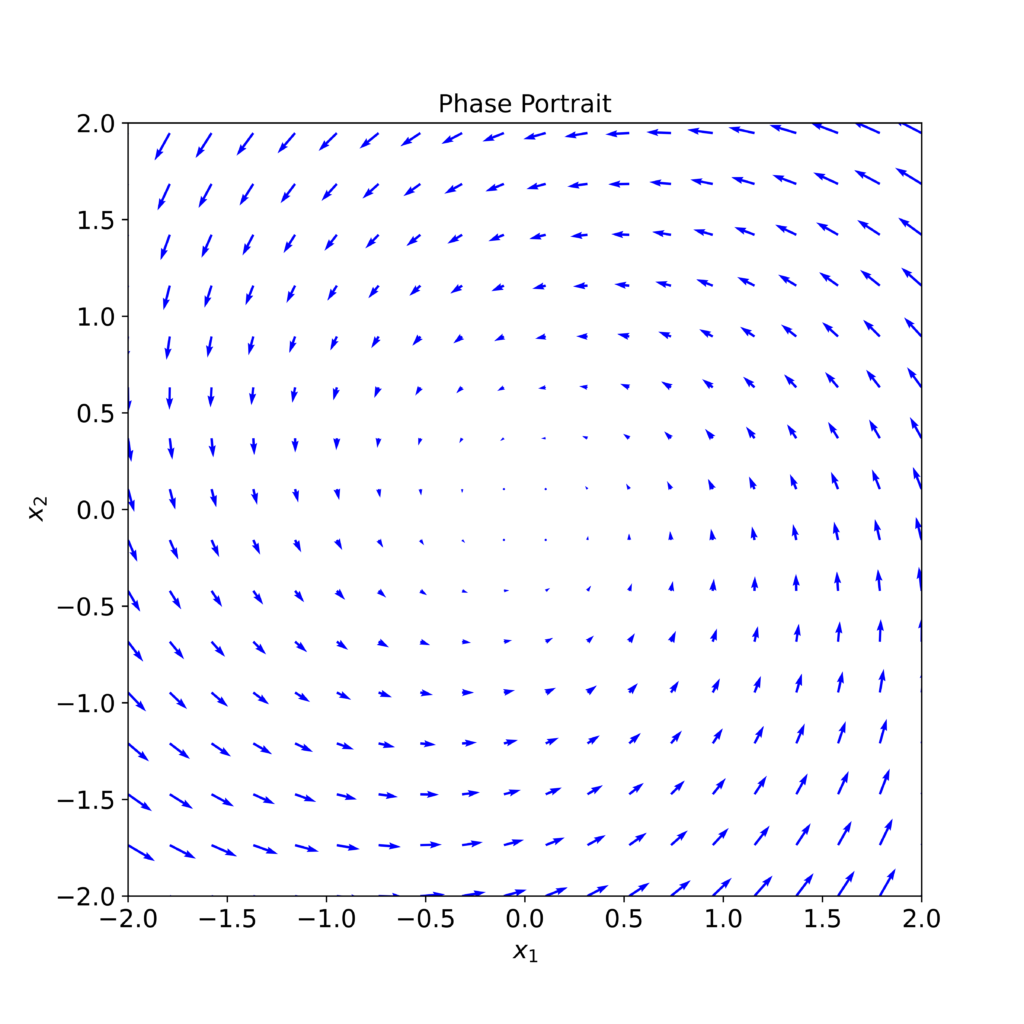
An arrow at a certain point is actually a tangent to the state-space trajectory at that point. Loosely speaking, during the small time interval, the direction of the arrow denotes the direction of the state-space trajectory evolution at a particular point.
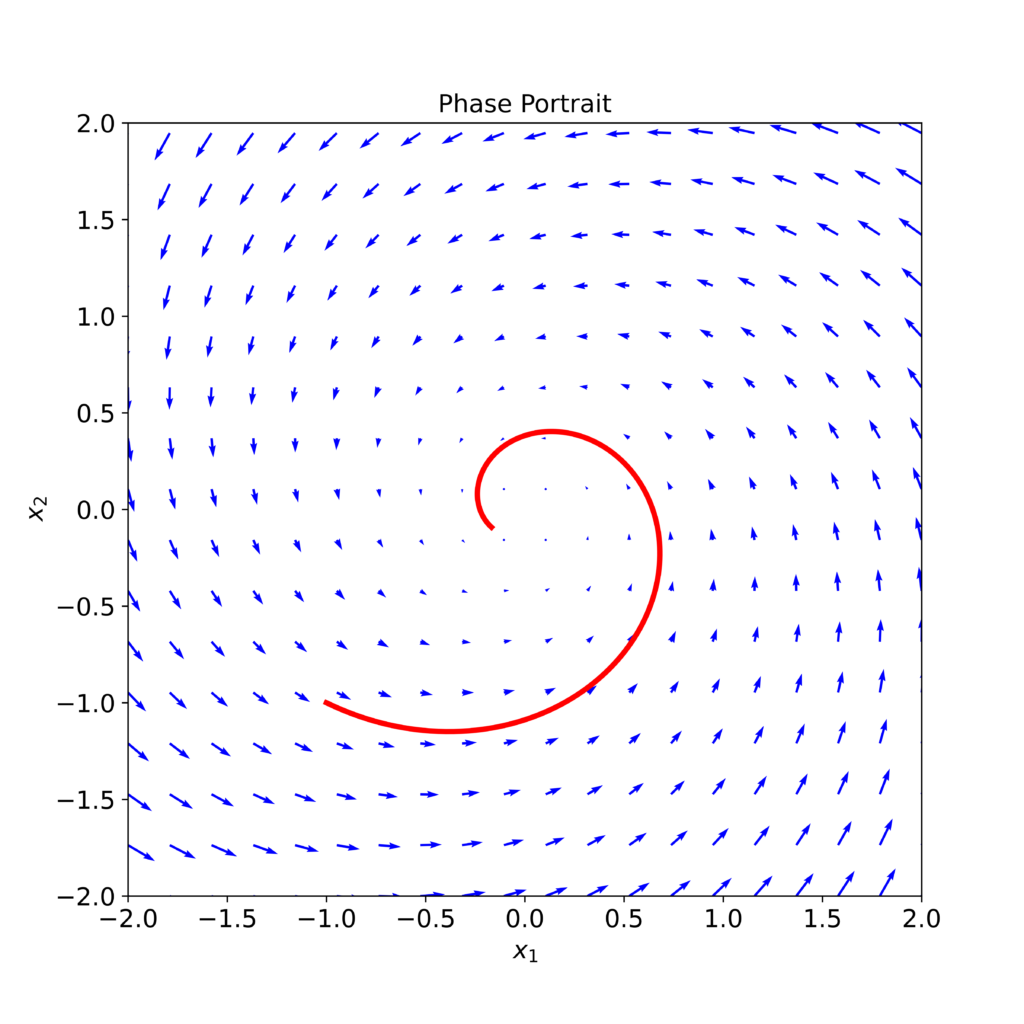
Besides learning how to plot a phase portrait of a dynamical system, you will learn how to plot a particular state-space trajectory obtained by simulating (1) from a given initial state. A simulated state trajectory (red line) is shown in Figure 2 below. This state-space trajectory is generated for the initial conditions  and
and  .
.
 .
.Let us now explain the main idea for constructing phase portraits. Consider the general form of a state-space model of a dynamical system:
(2) 
The vector  defines a tangent to the state-space trajectory. This tangent is shown in Fig. 3 below.
defines a tangent to the state-space trajectory. This tangent is shown in Fig. 3 below.
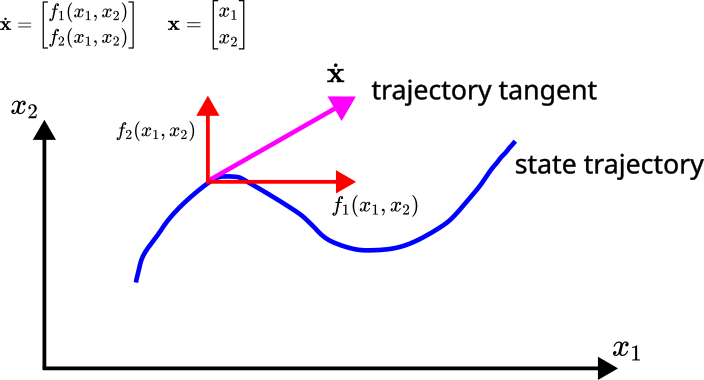
The components of the tangent vector are  and
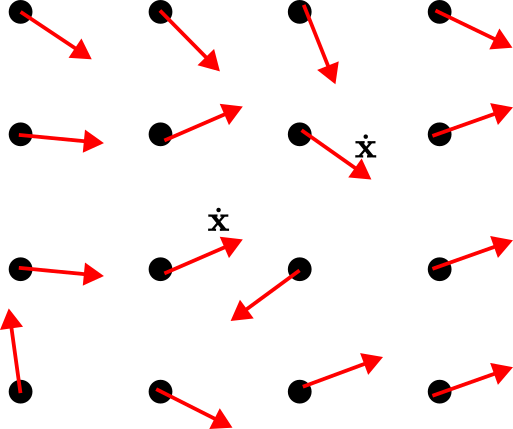
and  . Consequently, for known values of and we can construct the tangent vector . The tangent vectors at trajectory points define the phase portraits. Consequently, to construct the phase portrait, we construct a grid of state-space points shown in Fig. 4. Then, at every point of this grid, we calculate the and projections of the tangent vector and construct the tangent vector. These tangent vectors define the phase portrait.
. Consequently, for known values of and we can construct the tangent vector . The tangent vectors at trajectory points define the phase portraits. Consequently, to construct the phase portrait, we construct a grid of state-space points shown in Fig. 4. Then, at every point of this grid, we calculate the and projections of the tangent vector and construct the tangent vector. These tangent vectors define the phase portrait.
Python Code for Generating Phase Portraits
The first step is to import the necessary libraries and functions and to define a function that corresponds to the right-hand side of our state-space model. The code is given below.
import matplotlib.pyplot as plt
from scipy.integrate import odeint
import numpy as np
# first create create a function that evaluates the right-hand-side of the
# state-space equations for a given state vector
# x is the current state vector
# t is current simulation time
def dynamicsStateSpace(x,t):
dxdt=[-x[0]-3*x[1],3*x[0]-x[1]]
return dxdt
The function “odeint” is used for simulating the state-space trajectory and for generating Fig. 2 at the beginning of the tutorial. For a given state vector  , the function “dynamicsStateSpace” evaluates the right-hand side of the state-space model (1). That is, this function returns the projections of the tangent vector at the particular state.
, the function “dynamicsStateSpace” evaluates the right-hand side of the state-space model (1). That is, this function returns the projections of the tangent vector at the particular state.
The next step is to define a grid of points at which we will compute the tangent vectors. After we define the grid, we compute the tangent vectors. This is performed by the following code
# next, define a grid of points at which we will show arrows
x0=np.linspace(-2,2,20)
x1=np.linspace(-2,3,20)
# create a grid
X0,X1=np.meshgrid(x0,x1)
# projections of the trajectory tangent vector
dX0=np.zeros(X0.shape)
dX1=np.zeros(X1.shape)
shape1,shape2=X1.shape
for indexShape1 in range(shape1):
for indexShape2 in range(shape2):
dxdtAtX=dynamicsStateSpace([X0[indexShape1,indexShape2],X1[indexShape1,indexShape2]],0)
dX0[indexShape1,indexShape2]=dxdtAtX[0]
dX1[indexShape1,indexShape2]=dxdtAtX[1]
The arrays  and
and  define the limits of our grid. We use the meshgrid function explained in our previous tutorial to generate the grid. The grid points are stored in the matrices X0 and X1. The projections of the tangent vectors at the grid points are stored in the matrices dX0 and dX1. The nested for loops iterate through grid points and compute the projections of the tangent vectors.
define the limits of our grid. We use the meshgrid function explained in our previous tutorial to generate the grid. The grid points are stored in the matrices X0 and X1. The projections of the tangent vectors at the grid points are stored in the matrices dX0 and dX1. The nested for loops iterate through grid points and compute the projections of the tangent vectors.
The final step is to plot the phase portrait. This is performed by the following code.
<pre class="wp-block-syntaxhighlighter-code">#adjust the figure size
plt.figure(figsize=(8, 8))
# plot the phase portrait
plt.quiver(X0,X1,dX0,dX1,color='b')
# adjust the axis limits
plt.xlim(-2,2)
plt.ylim(-2,2)
# insert the title
plt.title('Phase Portrait', fontsize=14)
# set the axis labels
plt.xlabel('<img src="https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-1ee89d257836594b43959a4b9ba70cc6_l3.png" class="ql-img-inline-formula quicklatex-auto-format" alt="x_{1}" title="Rendered by QuickLaTeX.com" height="11" width="16" style="vertical-align: -3px;"/>',fontsize=14)
plt.ylabel('<img src="https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-1b8f7c11a53579abfdd4b94207dfc798_l3.png" class="ql-img-inline-formula quicklatex-auto-format" alt="x_{2}" title="Rendered by QuickLaTeX.com" height="11" width="17" style="vertical-align: -3px;"/>',fontsize=14)
# adjust the font size of x and y axes
plt.tick_params(axis='both', which='major', labelsize=14)
# insert legend
# plt.legend(fontsize=14)
# save figure
plt.savefig('phasePortrait.png',dpi=600)
plt.show()</pre>
These code lines generate the plot shown in the figure below.
Next, we simulate a state-space trajectory for a selected initial condition, and we plot this state-space trajectory on the same phase portrait. This is performed by the following code.
<pre class="wp-block-syntaxhighlighter-code"># now simulate the dynamics for a certain starting trajectory and
# plot the dynamics on the same graph
initialState=np.array([-1,-1])
simulationTime=np.linspace(0,2,200)
# generate the state-space trajectory
solutionState=odeint(dynamicsStateSpace,initialState,simulationTime)
#adjust the figure size
plt.figure(figsize=(8, 8))
# plot the phase portrait
plt.quiver(X0,X1,dX0,dX1,color='b')
# adjust the axis limits
plt.xlim(-2,2)
plt.ylim(-2,2)
# add the state trajectory plot
plt.plot(solutionState[:,0], solutionState[:,1], color='r',linewidth=3)
# insert the title
plt.title('Phase Portrait', fontsize=14)
# set the axis labels
plt.xlabel('<img src="https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-1ee89d257836594b43959a4b9ba70cc6_l3.png" class="ql-img-inline-formula quicklatex-auto-format" alt="x_{1}" title="Rendered by QuickLaTeX.com" height="11" width="16" style="vertical-align: -3px;"/>',fontsize=14)
plt.ylabel('<img src="https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-1b8f7c11a53579abfdd4b94207dfc798_l3.png" class="ql-img-inline-formula quicklatex-auto-format" alt="x_{2}" title="Rendered by QuickLaTeX.com" height="11" width="17" style="vertical-align: -3px;"/>',fontsize=14)
# adjust the font size of x and y axes
plt.tick_params(axis='both', which='major', labelsize=14)
# insert legend
# plt.legend(fontsize=14)
# save figure
plt.savefig('phasePortraitStateTrajectory.png',dpi=600)
plt.show()
</pre>
The generated state-space trajectory is shown in the figure below.