 by
by Example 1:
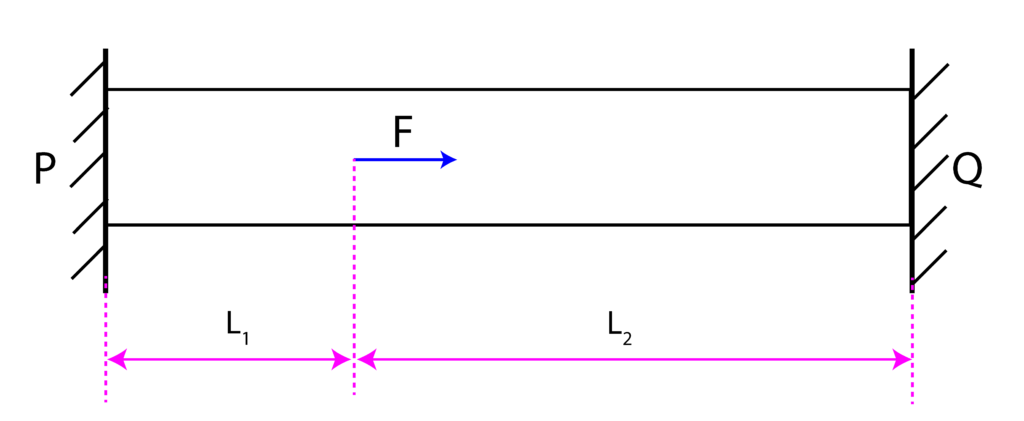
Consider the axial member constrained between two planes  and
and  . The cross-section area is
. The cross-section area is  and the modulus of elasticity
and the modulus of elasticity  are given. A numerical value of the force
are given. A numerical value of the force  acting at the distance
acting at the distance  from the plate is also given. Assuming that and
from the plate is also given. Assuming that and  are known, determine the reaction forces
are known, determine the reaction forces  and
and  .
.
Solution:
The first step is to construct the free body diagram. The free-body diagram is given in the figure below. Notice here that we have assumed the directions of the forces and  . If we obtain negative values of these forces, then the actual direction of these forces is opposite from the assumed directions.
. If we obtain negative values of these forces, then the actual direction of these forces is opposite from the assumed directions.
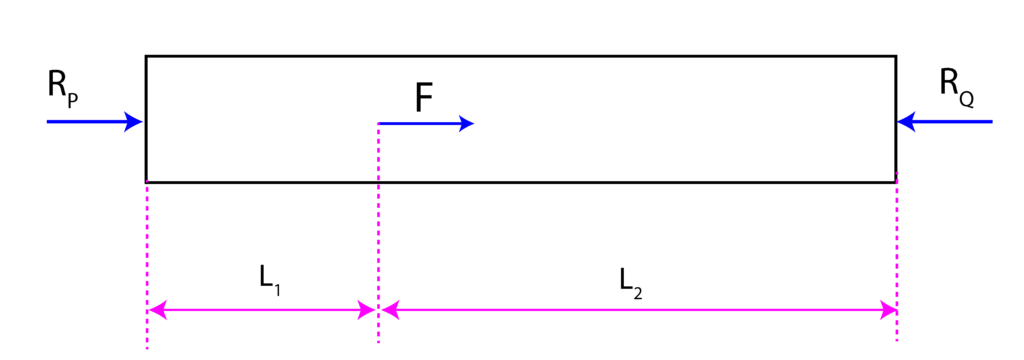
Assuming that the positive direction is the direction of the force , the static equilibrium condition is
(1) 
This is a single equation with two unknowns and . Consequently, we cannot uniquely solve this equation. To solve this equation, we need an additional equation. This equation is a deformation equation. Namely, since the member is constrained between two parallel plates, it cannot deform, and consequently:
(2) 
To compute the total deformation and to set it to zero, we need internal force diagrams. Figure 2 below shows the internal force diagrams. We will briefly revise the procedure for computing internal force diagrams. For additional explanations on how to construct an internal force diagram, see this lecture.
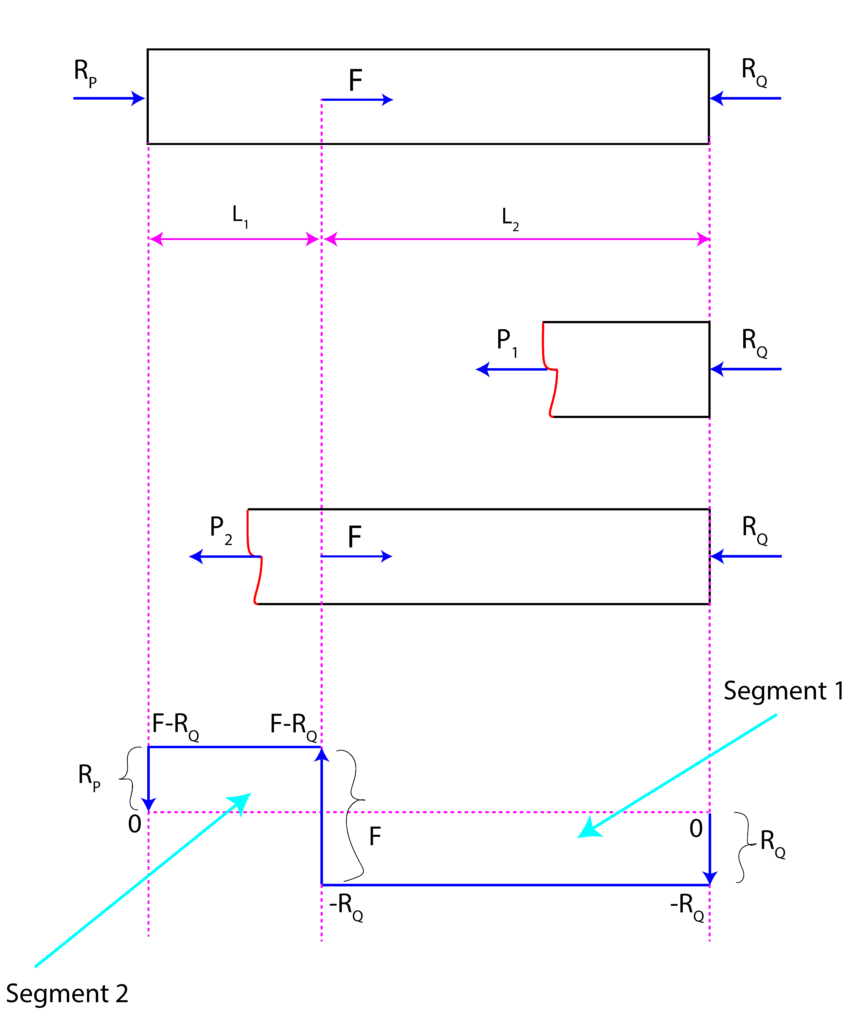
Let us compute the internal force for Segment 1. Assuming that the positive direction is in the direction of the internal force  , the static equilibrium condition is
, the static equilibrium condition is
(3) 
On the other hand, the static equilibrium condition for Segment 2 is
(4) 
The internal force diagram is shown in the last subfigure of Fig. 3. Once we have determined the internal force diagram, we can compute the total deformation using the principle explained in the previous lecture given here.
We have
(5) 
where
(6) 
By substituting these two equations in Eq.(5), we obtain
(7) 
where the second equation is obtained by multiplying the first equation with  . From the second equation, we obtain
. From the second equation, we obtain
(8) 
Next, we substitute the computed in Eq.(1). As the result, we obtain
(9) 
The fact that we have obtained the negative value of , means that the direction of  is different from the direction assumed while constructing the free-body diagram in Fig. 2 . The problem is solved.
is different from the direction assumed while constructing the free-body diagram in Fig. 2 . The problem is solved.