 by
by
In our previous tutorial, which can be found here, we introduced the iterative policy evaluation algorithm for computing the state-value function. We also explained how to implement this algorithm in Python, and we tested the algorithm on the Frozen Lake Open AI Gym environment introduced in this post. The GitHub page with the codes developed in this tutorial is given here.
In this tutorial, we introduce a policy iteration algorithm. We explain how to implement this algorithm in Python and we explain how to solve the Frozen Lake problem by using this algorithm. Before reading this post, you should get yourself familiar with the following topics (links provided below):
- Frozen Lake environment and OpenAI Gym
- State value function and its Bellman equation
- The iterative policy evaluation algorithm
Motivation and Final Solution
Our goal is to solve the Frozen Lake problem. The Frozen Lake problem and its environment are explained in our previous post. This environment is illustrated in the figure below.
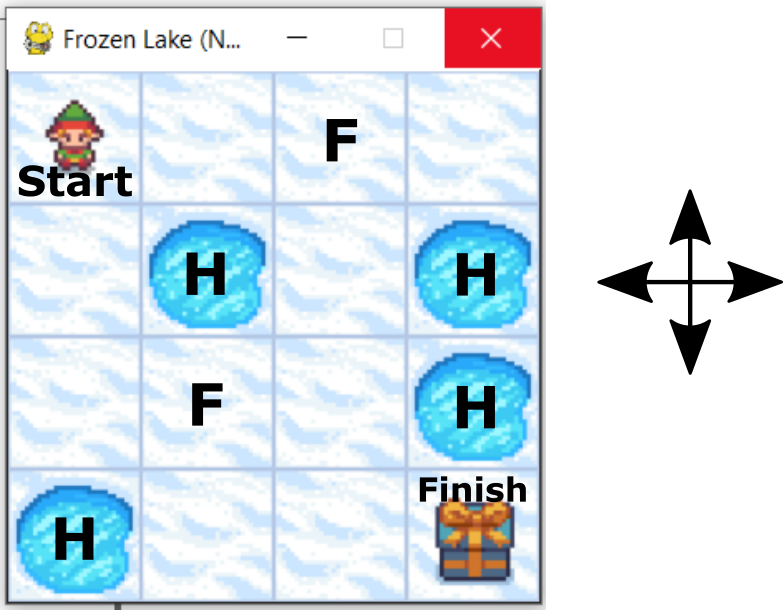
The goal is to reach “Finish” field starting from “Start” field. We can only perform the actions “UP”, “DOWN”, “LEFT”, and “RIGHT”. We have two types of fields: frozen field, denoted by “F”, and the hole field denoted by “H”. We can safely step on the frozen field. However, if we step on hole fields, we unsuccessfully end the game. The goal is to design a series of actions (“UP”,”DOWN”,”LEFT”, and “RIGHT”), such that we reach the finish the finish state by maximizing a reward function. In this post, we teach you how to solve this problem. The solution is shown in the figure below.
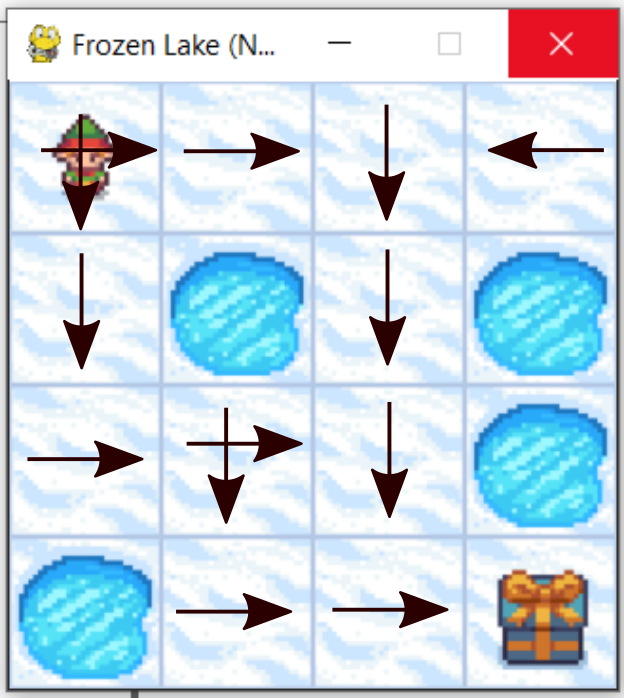
This solution is explained below.
Explanation of the Policy Iteration Algorithm
First, we need to introduce and explain the implementation of the policy iteration algorithm. The state value function is introduced and interpreted in our previous tutorial. The state value function has the following form, expressed by its Bellman equation:
(1) ![\begin{align*}v_{\pi}(s) & =E_{\pi}[G_{t}|S_{t}=s] \\v_{\pi}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-b73654d861dc49f013a4f2ca6f4a5898_l3.svg "Rendered by QuickLaTeX.com")
where
![E_{\pi}[\cdot]](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-d8ca3e5443f3f8c37be84d5af753d326_l3.svg "Rendered by QuickLaTeX.com") is the mathematical expectation assuming that the agent follows the policy
is the mathematical expectation assuming that the agent follows the policy 
 is the state value function
is the state value function is the current time step
is the current time step-
 is the current state
is the current state  is the return (weighted sum of rewards)
is the return (weighted sum of rewards)-
 is the action
is the action  is the reward
is the reward is one of the possible states at the next time instant
is one of the possible states at the next time instant 
 is the policy (probability of selecting a certain action at the state )
is the policy (probability of selecting a certain action at the state ) is the dynamics (probability of reaching the state at the next time instant and obtaining the reward if the agent is in the state at the time instant , and if the agent applied the action at the time instant )
is the dynamics (probability of reaching the state at the next time instant and obtaining the reward if the agent is in the state at the time instant , and if the agent applied the action at the time instant )
In addition to the state value function (1), for the policy iteration algorithm, we also need an action-value function. The action value function is defined as follows:
(2) ![\begin{align*}q_{\pi}(s) & =E_{\pi}[G_{t}|S_{t}=s,A_{t}=a] \end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-dc7fb11e0fbb4f4c132f77093b1b9b23_l3.svg "Rendered by QuickLaTeX.com")
Here you should immediately notice the main difference between (1) and (2). The action value function is defined under the assumption that the agent takes an action in the state at the current time instant . That is, the action value function is the expected return from the state under the assumption that the agent took the action . On the other hand, the state value function (1) does not assume that the particular action is taken at the state . That is, the state value function is defined by assuming that a particular action is not being taken.
The Bellman equation for the action value function is
(3) ![\begin{align*}q_{\pi}(s)= \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-f255c010355123813bfc98bd2a1359bf_l3.svg "Rendered by QuickLaTeX.com")
In the sequel let us design an algorithm that will try to find an optimal policy that will maximize the state value function. That is, we want to find actions that will maximize the expected return from the state . The Bellman optimality equation for the state value function can provide us with a good direction for solving this problem. Before we introduce the Bellman optimality equation for the state value function, we introduce the optimal state-value function:
(4) 
and we introduce the optimal action-value function
(5) 
Let the optimal policy that solves (4) and (5), be denoted by  . Let us for a moment stop and analyze (4) and (5). The optimal state-value and action-value functions are obtained by finding the optimal policy that will produce the highest value of the expected return under the two scenarios used to define the state-value and action-value functions.
. Let us for a moment stop and analyze (4) and (5). The optimal state-value and action-value functions are obtained by finding the optimal policy that will produce the highest value of the expected return under the two scenarios used to define the state-value and action-value functions.
Next, we have that
(6) 
From the last equation, and by using a similar strategy to the strategy used to derive (3), we obtain the Bellman optimality equation for the state value function:
(7) ![\begin{align*}v_{*}(s)=\max_{a} \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{*}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-5c926bc6a278fa6a1e45fb28d278e67a_l3.svg "Rendered by QuickLaTeX.com")
The equations (3), (6), and (7) can give us a clue on how to determine an optimal policy. Let us say that we start our search for an optimal policy, with a certain policy  that is suboptimal or even completely random. That is, we can randomly select this policy. In the notation, , the subscript
that is suboptimal or even completely random. That is, we can randomly select this policy. In the notation, , the subscript  denotes an iteration of finding the optimal policy. This policy is defined for every state . For such a fixed and known policy, we can compute the state value function
denotes an iteration of finding the optimal policy. This policy is defined for every state . For such a fixed and known policy, we can compute the state value function  for every state by using the iterative policy evaluation algorithm, which is explained in our previous post. Then, once we have , we can determine a new improved policy by maximizing with respect to actions the action value function at that state. That is,
for every state by using the iterative policy evaluation algorithm, which is explained in our previous post. Then, once we have , we can determine a new improved policy by maximizing with respect to actions the action value function at that state. That is,
(8) 
(9) ![\begin{align*}\text{action to take in state s} & = \underset{a}{\text{argmax}} \;\;\; \underbrace{\sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi_{0}}(s')]}_{q_{\pi_{0}}(s,a)}\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-242be27dec0842d7ae9ade15d57e6933_l3.svg "Rendered by QuickLaTeX.com")
The solution of (9) actually defines an improved policy  . Note here that if there is only a single solution to this problem, then the computed policy is completely deterministic. That is, if the solution is denoted by
. Note here that if there is only a single solution to this problem, then the computed policy is completely deterministic. That is, if the solution is denoted by  , then
, then  . That is, we always select . On the other hand, if there are multiple solutions that produce the same maximal value, then we can assign an equal probability to each of these solutions, and in this way obtain the policy . In practice, we can solve the problem (9), by evaluating the action value functions
. That is, we always select . On the other hand, if there are multiple solutions that produce the same maximal value, then we can assign an equal probability to each of these solutions, and in this way obtain the policy . In practice, we can solve the problem (9), by evaluating the action value functions
(10) ![\begin{align*} q_{\pi_{0}}(s,a) =\sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi_{0}}(s')] \end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-5dab09f54adfddff4b670e0b2c7dcda9_l3.svg "Rendered by QuickLaTeX.com")
for all possible actions starting from the fixed state . Then, we can choose the action that produces the maximum action-value function, and this action (or actions if there are multiple actions that produce the same maximum) define the policy .
Next, for the newly computed policy , we compute the state value function  by using the iterative policy evaluation algorithm. Then, we compute the new actions and policy by solving:
by using the iterative policy evaluation algorithm. Then, we compute the new actions and policy by solving:
(11) ![\begin{align*}\text{action to take in state s} & = \underbrace{\underset{a}{\text{argmax}} \;\;\; \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi_{1}}(s')]}_{ q_{\pi_{1}}(s,a)}\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-e498ece64f711a77b6e48657f8a89a59_l3.svg "Rendered by QuickLaTeX.com")
The solution of (11) defines a new policy  . These two steps are repeated iteratively until convergence. This is the main idea of the policy iteration algorithm that is summarized below.
. These two steps are repeated iteratively until convergence. This is the main idea of the policy iteration algorithm that is summarized below.
POLICY ITERATION ALGORITHM:
Perform these two steps iteratively until convergence of the computed policy 
- Policy evaluation: For the policy compute the state-value function
 by using the iterative policy evaluation algorithm for every state s.
by using the iterative policy evaluation algorithm for every state s. - Policy improvement: For the computed state-value function , for every state s, compute the action to be taken in state s by solving
(12)
![\begin{align*}& \text{action to take in state s} = \underset{a}{\text{argmax}} \;\;\; q_{\pi_{k}}(s,a) \\ & q_{\pi_{k}}(s,a)=\sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi_{k}}(s')] \end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-7ef3bc2624854ea5259db00f84c9d0bd_l3.svg "Rendered by QuickLaTeX.com")
The solution of (12) defines an improved policy in the state . After this step is finished increment
in the state . After this step is finished increment  and go to step 1.
and go to step 1.
As mentioned previously this algorithm can be initialized with a complete random policy or with a policy obtained on the basis of some a priori knowledge about the environment.
Python Implementation
The GitHub page with the codes developed in this tutorial is given here. To test the policy iteration algorithm, we use the Frozen Lake environment explained in this tutorial. Here, we only provide a photo of the Frozen Lake environment, for more details see the tutorial. The Frozen Lake environment is shown in Fig. 3. below.

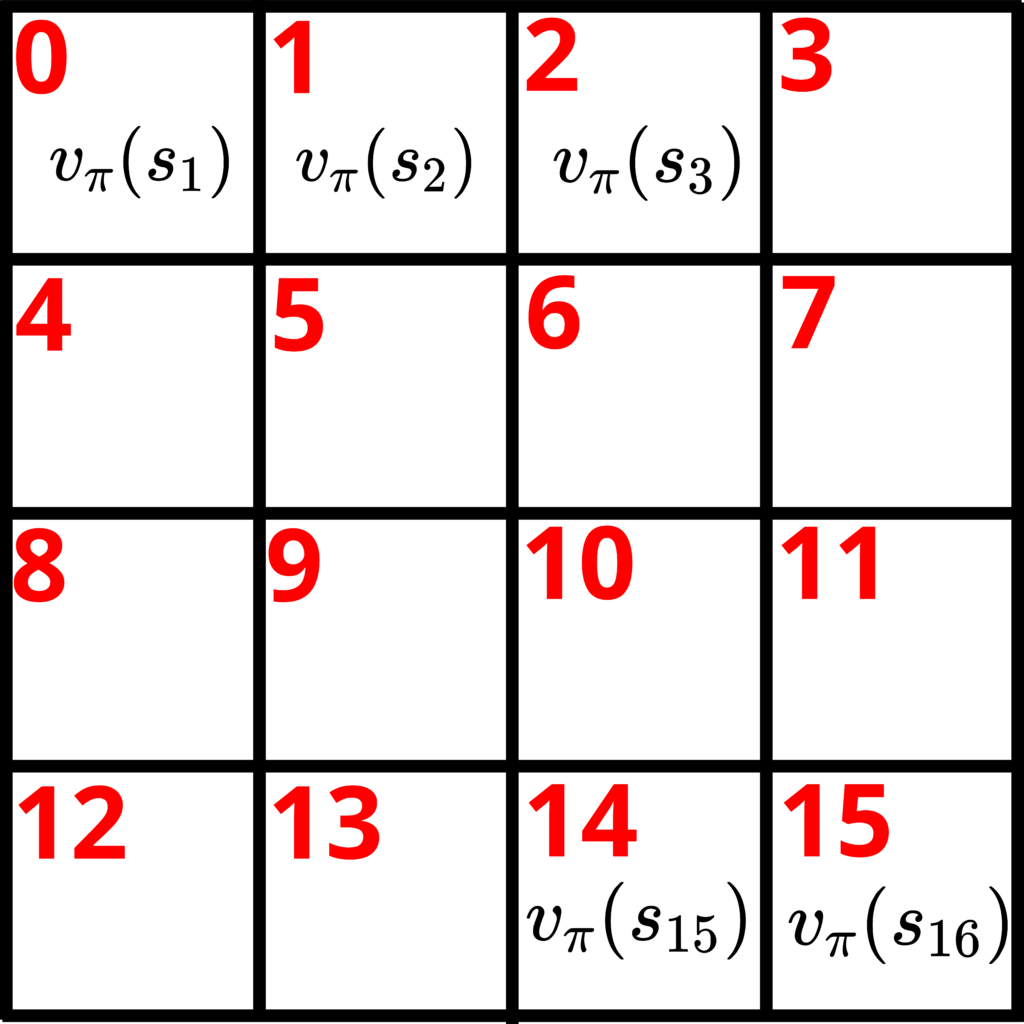
The states  together with the corresponding state value functions
together with the corresponding state value functions  are shown in Fig. 4. below.
are shown in Fig. 4. below.
The first step is to define two functions. The first function will be used to implement the step 1 of the policy iteration algorithm. That is, this function will evaluate the policy or better to say, this function will compute the state-value function for a given policy. This function is actually developed in our previous tutorial, and here for brevity, we will not explain this function again. We will only briefly explain its inputs and outputs, and the general purpose. The function is given below.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 | ################### this function computes the state value function by using the iterative policy evaluation algorithm################### inputs: ################### env - environment # valueFunctionVector - initial state value function vector# policy - policy to be evaluated - this is a matrix with the dimensions (number of states)x(number of actions)# - p,q entry of this matrix is the probability of selection action q in state p# discountRate - discount rate # maxNumberOfIterations - max number of iterations of the iterative policy evaluation algorithm# convergenceTolerance - convergence tolerance of the iterative policy evaluation algorithm################### outputs:################### valueFunctionVector - final value of the state value function vector ##################def evaluatePolicy(env,valueFunctionVector,policy,discountRate,maxNumberOfIterations,convergenceTolerance): import numpy as np convergenceTrack=[] for iterations in range(maxNumberOfIterations): convergenceTrack.append(np.linalg.norm(valueFunctionVector,2)) valueFunctionVectorNextIteration=np.zeros(env.observation_space.n) for state in env.P: outerSum=0 for action in env.P[state]: innerSum=0 for probability, nextState, reward, isTerminalState in env.P[state][action]: #print(probability, nextState, reward, isTerminalState) innerSum=innerSum+ probability*(reward+discountRate*valueFunctionVector[nextState]) outerSum=outerSum+policy[state,action]*innerSum valueFunctionVectorNextIteration[state]=outerSum if(np.max(np.abs(valueFunctionVectorNextIteration-valueFunctionVector))<convergenceTolerance): valueFunctionVector=valueFunctionVectorNextIteration print('Iterative policy evaluation algorithm converged!') break valueFunctionVector=valueFunctionVectorNextIteration return valueFunctionVector |
The first argument of this function, called “env” is the OpenAI Gym Frozen Lake environment. The second argument, called “valueFunctionVector” is the value function vector. It represents an initial value of the state-value function vector. This vector is iteratively updated by this function, and its value is returned. For the Frozen Lake environment, this vector has the following form
(13) 
The third argument, denoted by “policy” is a matrix defining the policy that needs to be evaluated. This matrix has this form
(14) 
where  is the probability of selecting the action
is the probability of selecting the action  in the state
in the state  . The last three arguments are the discount rate
. The last three arguments are the discount rate  , max number of iterations, and convergence tolerance. These values are explained in the previous tutorial on the iterative policy evaluation.
, max number of iterations, and convergence tolerance. These values are explained in the previous tutorial on the iterative policy evaluation.
The second function implements the step 2 of the policy iteration algorithm. That is, this function is used to improve the policy. The function is given below.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 | ################### this function computes an improved policy ################### inputs: # env - environment # valueFunctionVector - state value function vector that is previously computed# numberActions - number of actions # numberStates - number of states # discountRate - discount rate# outputs:# improvedPolicy - improved policy# qvaluesMatrix - matrix containing computed action-value functions # - (p,q) entry of this matrix is the action value function computed at the state p and for the action q# Note: qvaluesMatrix is just used for double check - it is actually not used lated on ##################def improvePolicy(env,valueFunctionVector,numberActions,numberStates,discountRate): import numpy as np # this matrix will store the q-values (action value functions) for every state # this matrix is returned by the function qvaluesMatrix=np.zeros((numberStates,numberActions)) # this is the improved policy # this matrix is returned by the function improvedPolicy=np.zeros((numberStates,numberActions)) for stateIndex in range(numberStates): # computes a row of the qvaluesMatrix[stateIndex,:] for fixed stateIndex, # this loop iterates over the actions for actionIndex in range(numberActions): # computes the Bellman equation for the action value function for probability, nextState, reward, isTerminalState in env.P[stateIndex][actionIndex]: qvaluesMatrix[stateIndex,actionIndex]=qvaluesMatrix[stateIndex,actionIndex]+probability*(reward+discountRate*valueFunctionVector[nextState]) # find the action indices that produce the highest values of action value functions bestActionIndex=np.where(qvaluesMatrix[stateIndex,:]==np.max(qvaluesMatrix[stateIndex,:])) # form the improved policy improvedPolicy[stateIndex,bestActionIndex]=1/np.size(bestActionIndex) return improvedPolicy,qvaluesMatrix |
Let us explain this function. The first argument is “env” which is previously explained. The second argument is “valueFunctionVector” that is the state-value function vector defined in (13). The remaining 3 input arguments are self-explanatory. This function returns the matrix called “improvedPolicy”, This matrix has the form shown in Eq.(14). The second output argument, called “qvaluesMatrix” has the following form
(15) 
where  is the action-value function at the state
is the action-value function at the state  and by applying the action
and by applying the action  . This matrix is only used to diagnose the accuracy of the algorithms. The code lines 29-35 are used to evaluate the equation for
. This matrix is only used to diagnose the accuracy of the algorithms. The code lines 29-35 are used to evaluate the equation for  and the code line 38 is used to solve the optimization problem (12). The code line 41 is used to compute every row of the matrix (14). That is to compute the probabilities. If for example, the value of “bestActionIndex” is 3 in the state
and the code line 38 is used to solve the optimization problem (12). The code line 41 is used to compute every row of the matrix (14). That is to compute the probabilities. If for example, the value of “bestActionIndex” is 3 in the state  , this means that we need to select
, this means that we need to select  in the state . In this case, the first row of the matrix is
in the state . In this case, the first row of the matrix is
(16) ![\begin{align*}\text{qvaluesMatrix}[0,:]=\begin{bmatrix} 0 & 0 & 0 & 1 \end{bmatrix}\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-ea3e7c00d7c9d5cc174d37ae7cd80223_l3.svg "Rendered by QuickLaTeX.com")
On the other hand, it may happen that two values of  have the same value. For example, in the state , we might have bestActionIndex=[1,2]. That is, both actions
have the same value. For example, in the state , we might have bestActionIndex=[1,2]. That is, both actions  and
and  are optimal in the state . This means that
are optimal in the state . This means that
(17) ![\begin{align*}\text{qvaluesMatrix}[0,:]=\begin{bmatrix} 0 & 0.5 & 0.5 & 0 \end{bmatrix}\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-3ed594aae1085b1e63ad801382ce2266_l3.svg "Rendered by QuickLaTeX.com")
This means that we have a 50 of a chance of selecting the actions and in the state . The driver code for these two functions is:
of a chance of selecting the actions and in the state . The driver code for these two functions is:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 | import gymimport matplotlib.pyplot as pltimport seaborn as snsimport numpy as npfrom functions import evaluatePolicyfrom functions import improvePolicy# create the environment # this is a completely deterministic environmentenv=gym.make('FrozenLake-v1', desc=None, map_name="4x4", is_slippery=False,render_mode="human")# this is a completely stochastic environment - the algorithm will not work properly since the transition probabilities are equal -too much!#env=gym.make("FrozenLake-v1", render_mode="human") env.reset()# render the environment# uncomment this if you want to render the environmentenv.render()#env.close()# investigate the environment# observation space - states env.observation_spaceenv.action_space# actions:#0: LEFT#1: DOWN#2: RIGHT#3: UP########################################################################### general parameters for the policy iteration########################################################################### select the discount ratediscountRate=0.9# number of states - determined by the Frozen Lake environmentstateNumber=16# number of possible actions in every state - determined by the Frozen Lake environmentactionNumber=4# maximal number of iterations of the policy iteration algorithm maxNumberOfIterationsOfPolicyIteration=1000# select an initial policy# initial policy starts with a completely random policy# that is, in every state, there is an equal probability of choosing a particular actioninitialPolicy=(1/actionNumber)*np.ones((stateNumber,actionNumber))########################################################################### parameters of the iterative policy evaluation algorithm########################################################################### initialize the value function vectorvalueFunctionVectorInitial=np.zeros(env.observation_space.n)# maximum number of iterations of the iterative policy evaluation algorithmmaxNumberOfIterationsOfIterativePolicyEvaluation=1000# convergence tolerance convergenceToleranceIterativePolicyEvaluation=10**(-6)######################################################################################################################################################for iteration in range(maxNumberOfIterationsOfPolicyIteration): print("Iteration - {} - of policy iteration algorithm".format(iteration)) if (iteration == 0): currentPolicy=initialPolicy valueFunctionVectorComputed =evaluatePolicy(env,valueFunctionVectorInitial,currentPolicy,discountRate,maxNumberOfIterationsOfIterativePolicyEvaluation,convergenceToleranceIterativePolicyEvaluation) improvedPolicy,qvaluesMatrix=improvePolicy(env,valueFunctionVectorComputed,actionNumber,stateNumber,discountRate) # if two policies are equal up to a certain "small" tolerance # then break the loop - our algorithm converged if np.allclose(currentPolicy,improvedPolicy): currentPolicy=improvedPolicy print("Policy iteration algorithm converged!") break currentPolicy=improvedPolicy |
In the sequel, we only comment code lines that are not self-obvious. The code line 10 is used to is used to import the Frozen lake environment. Here it is very important to set the flag “is_slippery=False” . It is important to specify this flag to false since we want to ensure that the environment is deterministic. This means that the transition probabilities are 1. That is,  . Otherwise, we will have a completely stochastic environment, and it is difficult to solve the reinforcement learning problem. On the code line 46, we specify the initial policy matrix (??). Every element of this matrix is 0.25. This means that every action in a fixed state is equally possible. The code lines 59 to 71 implement the policy iteration algorithm. We iteratively call evaluatePolicy and improvePolicy functions. The algorithm converges only after several iterations. The resulting policy is given below.
. Otherwise, we will have a completely stochastic environment, and it is difficult to solve the reinforcement learning problem. On the code line 46, we specify the initial policy matrix (??). Every element of this matrix is 0.25. This means that every action in a fixed state is equally possible. The code lines 59 to 71 implement the policy iteration algorithm. We iteratively call evaluatePolicy and improvePolicy functions. The algorithm converges only after several iterations. The resulting policy is given below.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | currentPolicy=array([[0. , 0.5 , 0.5 , 0. ], [0. , 0. , 1. , 0. ], [0. , 1. , 0. , 0. ], [1. , 0. , 0. , 0. ], [0. , 1. , 0. , 0. ], [0.25, 0.25, 0.25, 0.25], [0. , 1. , 0. , 0. ], [0.25, 0.25, 0.25, 0.25], [0. , 0. , 1. , 0. ], [0. , 0.5 , 0.5 , 0. ], [0. , 1. , 0. , 0. ], [0.25, 0.25, 0.25, 0.25], [0.25, 0.25, 0.25, 0.25], [0. , 0. , 1. , 0. ], [0. , 0. , 1. , 0. ], [0.25, 0.25, 0.25, 0.25]]) |
Taking into account that actions are encoded as follows:
1 2 3 4 | #0: LEFT#1: DOWN#2: RIGHT#3: UP |
These actions are the columns of the matrix “currentPolicy”. This solution can graphically represented in the figure shown below. Consider the first row of the matrix currentPolicy. The first row of this matrix represents the actions we should take in the initial state . When we are in the initial state 1 – we can either select down or right actions. That is, the probability of these actions is 0.5 each. Consider the second row. This row corresponds to the actions we should take in state  . Since
. Since  is located at the entry (2,3), we select with probability 1 action right. By using this interpretation method, we can select proper actions in every state. The result is shown in the figure below.
is located at the entry (2,3), we select with probability 1 action right. By using this interpretation method, we can select proper actions in every state. The result is shown in the figure below.