 by
by
In this post, we explain how to solve an inverse kinematics problem of a robot with two degrees of freedom. In this relatively simple case, it is possible to solve the inverse kinematics problem analytically (that is, to compute the closed-form solution). The purpose of this example is to introduce the inverse kinematics problem. The YouTube video accompanying this post can be found here
Consider a manipulator with two rotational degrees of freedom  and
and  shown in the figure below.
shown in the figure below.
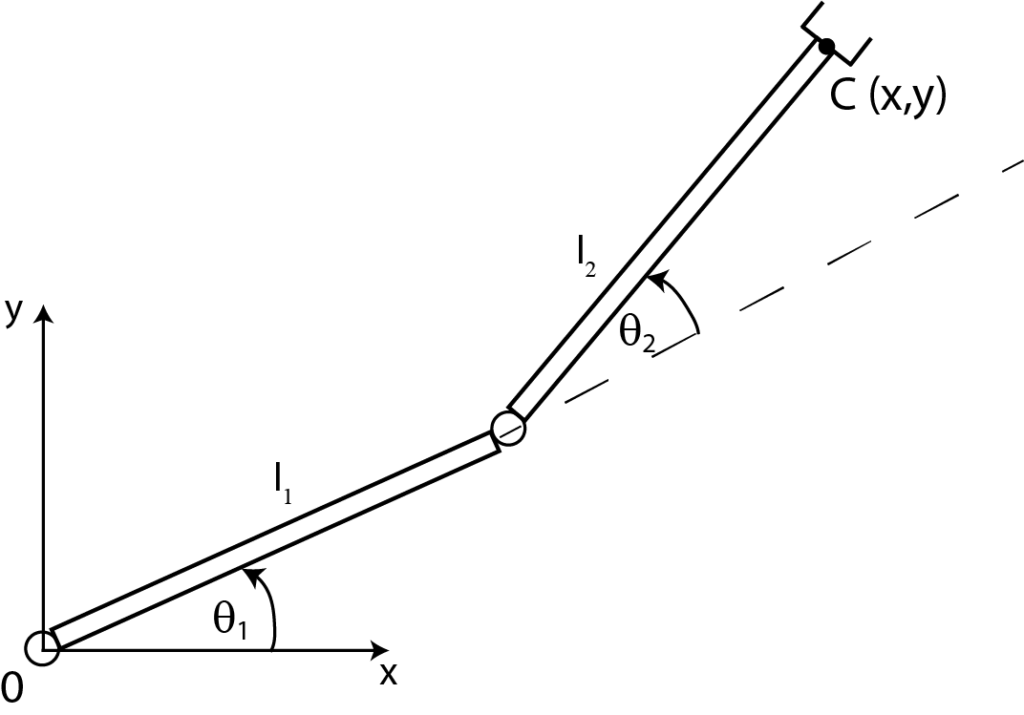
The inverse kinematics problem can be formulated as follows:
Given the coordinates x and y of the end-effector point C (world coordinates), compute the angles and (local joint coordinates).
In the statement of the inverse kinematics problem, it is assumed that the lengths of the robotic segments  and
and  are given.
are given.
From Figure 1, we have
(1) 
By squaring the last two equations and adding them together, we obtain
(2) 
Next, we use the following trigonometric formula
(3) 
By using this formula with  and
and  , from (2), we have
, from (2), we have
(4) 
where we have used the identity  (cosine function is an even function). From the last equation, we have
(cosine function is an even function). From the last equation, we have
(5) 
The last equation enables us to compute the angle as a function of  and
and  .
.
Here, an important observation should be made. Let us assume that the right-hand of the equation (5) is equal to  . To compute , we need to solve this equation
. To compute , we need to solve this equation
(6) 
This equation has an infinite number of solutions, however, there are only two solutions that are physically unique and physically realistic, these solutions are
(7) 
The figure below illustrates a similar scenario. We can observe that there are two possibilities for reaching point C (red and black manipulator positions).
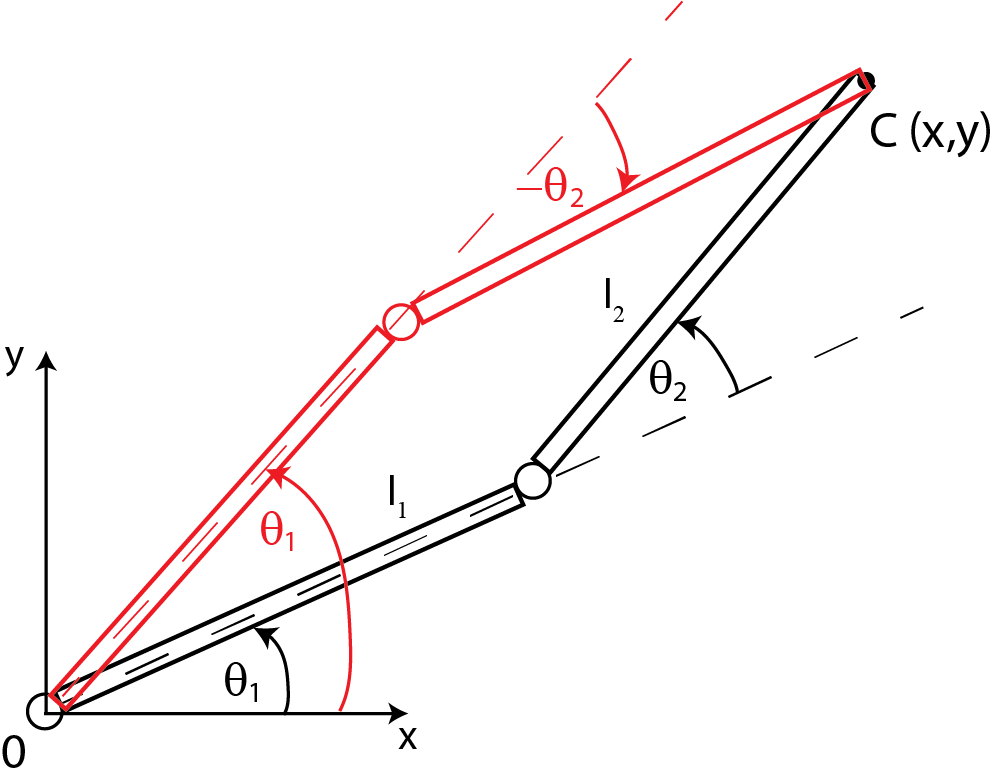
This is a common situation when solving the inverse kinematics problem.
We will determine the angle by analyzing the figure shown below.
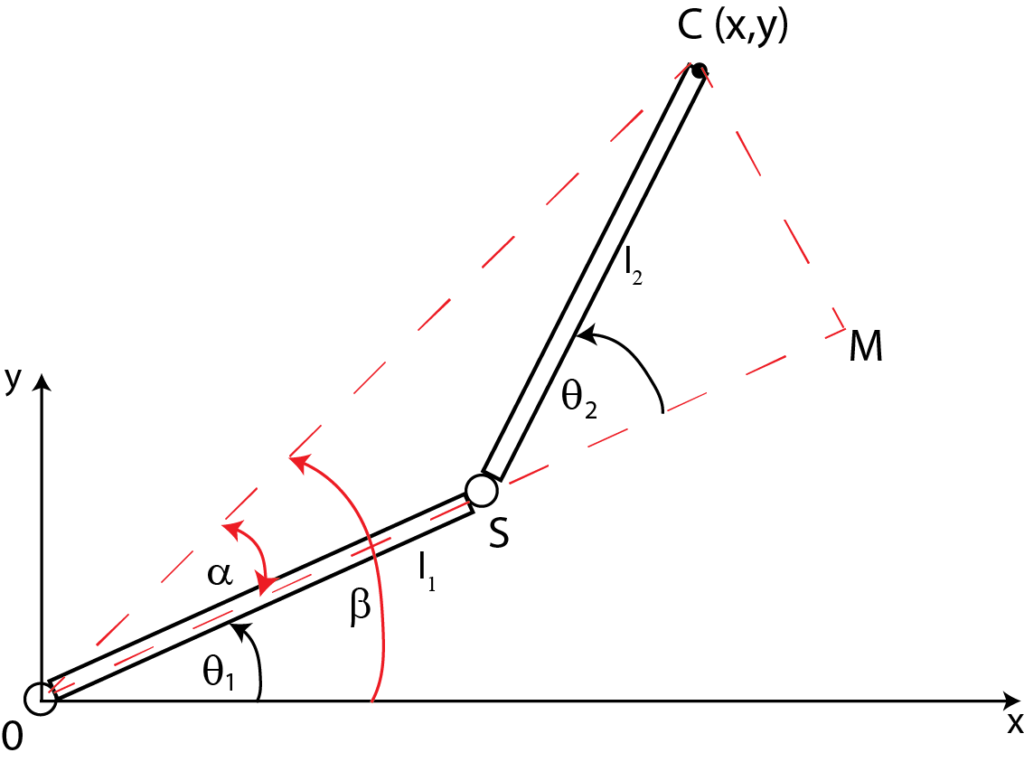 .
.From the figure 3, we have
(8) 
where  and
and  are angles shown in the figure below. We will find by using the tan() function. From (8), we have
are angles shown in the figure below. We will find by using the tan() function. From (8), we have
(9) 
Next, we will use the following formula
(10) 
From Fig. 3, we have
(11) 
on the other hand, from triangles OMC and CMS, we have
(12) 
Here, it should be noted that is only a function of , so once is determined from (5), we can find from (12).
By substituting (11) and (12) in (10), we obtain the final result for
(13) 