 by
by
In this reinforcement learning tutorial, we explain how to implement the on-policy SARSA temporal difference learning algorithm in Python. The YouTube video accompanying this post is given below.
Before reading this tutorial, it is a good idea to get yourself familiar with the following topics that we covered in the previous tutorials:
- Installation and Getting Started with OpenAI Gym and Frozen Lake Environment – Reinforcement Learning Tutorial
- Policy Iteration Algorithm in Python and Tests with Frozen Lake OpenAI Gym Environment- Reinforcement Learning Tutorial
- Python Implementation of the Greedy in the Limit with Infinite Exploration (GLIE) Monte Carlo Control Method – Reinforcement Learning Tutorial
Before we start, we first have to explain the abbreviation SARSA. SARSA stands for State-Action-Reward-State-Action. The reason for calling the algorithm like that will become apparent later.
Summary of the SARSA Temporal Difference Learning Algorithm
Here we provide a summary of the SARSA Temporal Difference Learning Algorithm. To explain the main idea of the algorithm, we consider the Frozen Lake environment. For an introduction to the Frozen Lake environment see our previous tutorial given here.
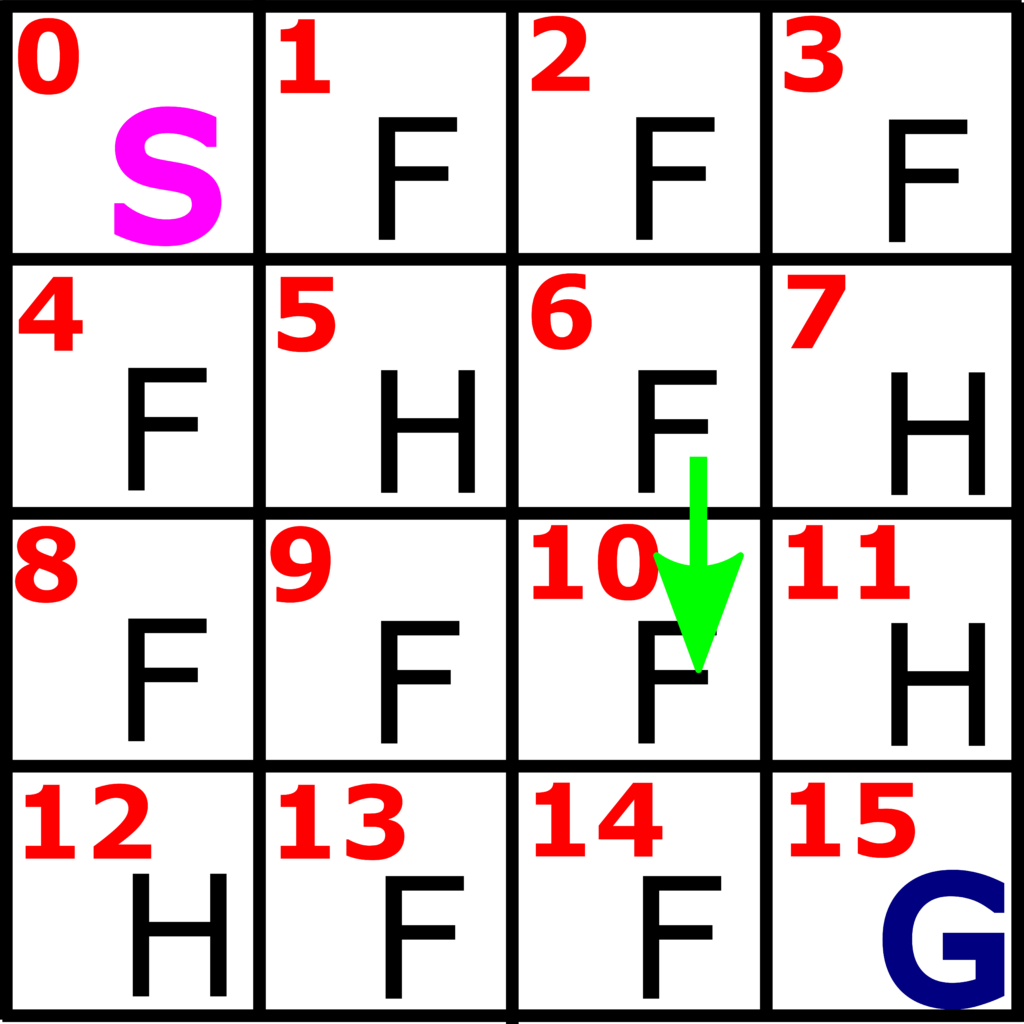
The Frozen lake environment consists of 16 fields. They are numbered from 0 to 15 and shown in the figure below. The starting field is “S”. The fields are states. Our task is to reach the goal state G by avoiding the hole states “H”, and by only stepping on the frozen fields “F”. In any state (except the hole states), we can perform actions: up, down, left, and right. By stepping on the goal state, we receive the reward of  , otherwise, we receive the reward of 0 if we step on any other field. If we step on the hole state, an episode is finished unsuccessfully. If we step on the goal state, an episode is finished successfully.
, otherwise, we receive the reward of 0 if we step on any other field. If we step on the hole state, an episode is finished unsuccessfully. If we step on the goal state, an episode is finished successfully.
To explain the SARSA Temporal Difference algorithm, we need to introduce the following notation.
- The current state is denoted by
 .
. - The action taken at the current state is denoted by
 .
. - The destination state that is reached by taking the action at the state is denoted by
 .
. - The action taken in the destination state is denoted by
 .
. - The reward obtained by reaching the state is denoted by
 .
.
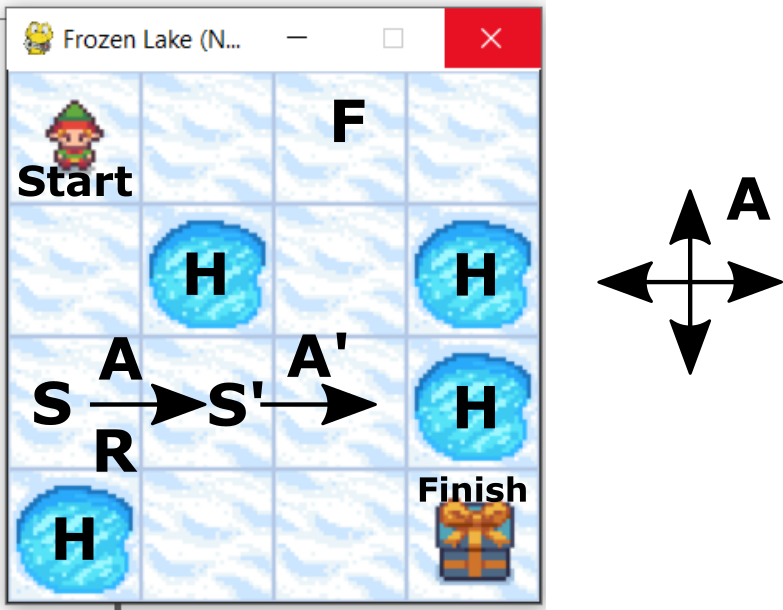
This notation is illustrated in the figure below.
 and .
and .The action value function at the state and under the action is denoted by  . The action value function is important since it is used to find the optimal policy by using the espsilon greedy approach that is explained here.
. The action value function is important since it is used to find the optimal policy by using the espsilon greedy approach that is explained here.
Here is the main idea of the SARSA temporal difference learning approach. Before the learning episodes start, we initialize to zero for all and . We start an episode from the start field , and we select an action by using a policy (rule for selecting the actions in particular states) that will be explained later in the text. This action leads us to the next state and we obtain the reward . At this next state, we select an by using the policy (under the condition that the destination state is not the terminal state). This is shown in the figure 2 above. Then, if the destination state is not a terminal state, having information about , we update the action value function as follows
(1) 
where  is the step size and
is the step size and  is the discount rate. If the state is the terminal state, then the update equation
is the discount rate. If the state is the terminal state, then the update equation
(2) 
The equations (1) and (2) are the core of the SARSA temporal difference learning. We keep on updating the action value functions by using these two equations until the end of an episode. That is, until we reach the terminal state that can either be the hole states or the goal state.
Now, it should be clear why the name of the algorithm is SARSA. This is because to compute the action value function update, we need the current State, the current Action, the current Rewards, next State, and next Action (SARSA).
The SARSA temporal difference reinforcement learning algorithm is summarized below.
Perform the following steps iteratively for every simulation episode
- Initialize the state
- Choose the action by using the epsilon greedy policy computed on the current value of Q(S,A).
- Simulate an episode starting from and in every time step of the episode perform recursively the steps given until the terminal state is reached
– 3.1) Apply the action A and observe the response of the environment. That is, observe the next state and the reward obtained by reaching that state.
– 3.2) Select the action on the basis of (if S’ is not the terminal state) by using the epsilon-greedy policy computed on the basis of the current value of Q(S’,A’). If the state is not the terminal state, update Q as follows(3)

if the state is the terminal state, update Q as follows(4)

– 3.3) Set and
and  and go to step 3.1) (if the terminal state is not reached)
and go to step 3.1) (if the terminal state is not reached)
Next, we have to explain the policy for selecting the action. Consider the figure below
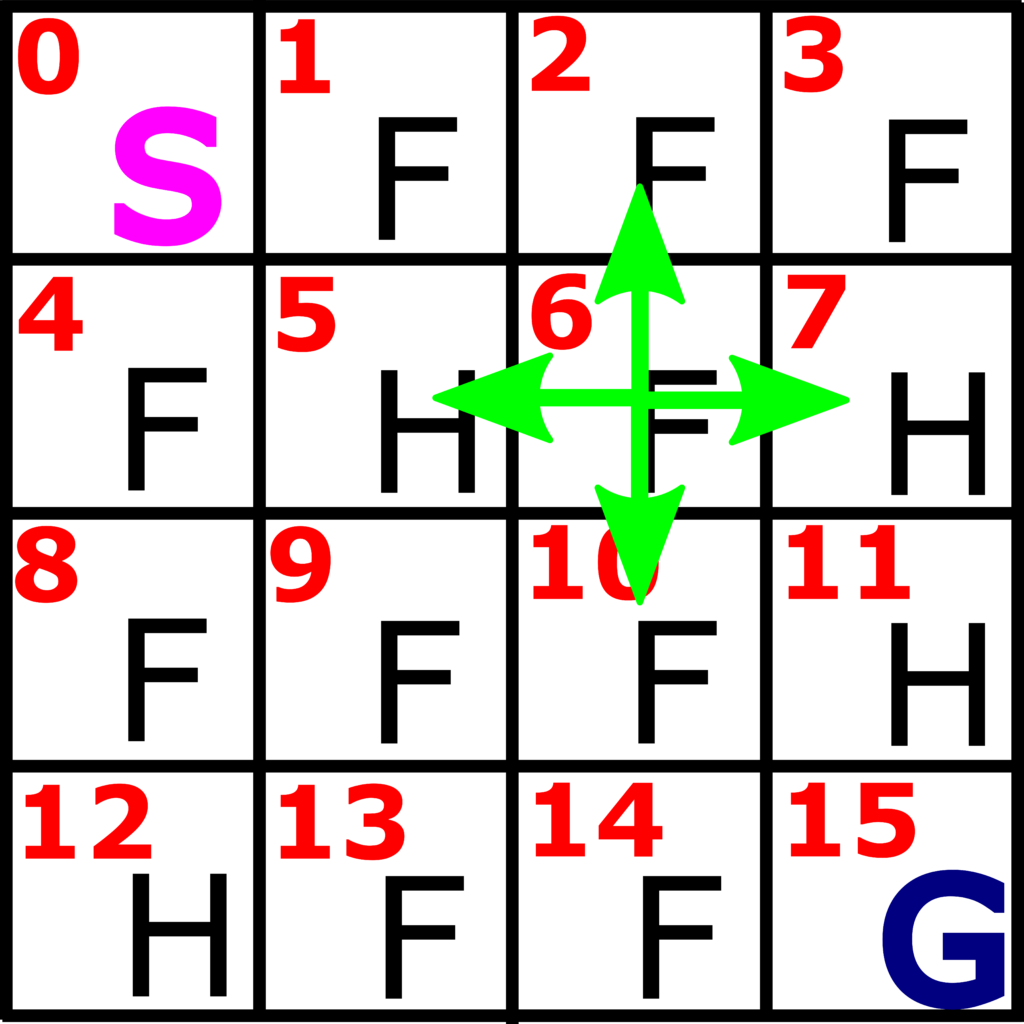
Let us suppose that we are in the state 6, and let us assume that the current action value function estimate in the state 6 is
(5) 
where the column numbers of this row vector (starting from zero in order to be consistent with the Python notation) correspond to the actions: 0 column is left, column 1 is action “down”, column 2 is action “right”, and column 3 is action “up”. The greedy action selection will select the action with the column number 1, corresponding to the maximal value of the action value function. That is, the maximum is  and it is achieved for the action 1. Consequently, we choose the action in state 6. This is the main idea of the greedy approach. In every state, select an action that produces the maximum value of the action value function. However, this greedy approach has one drawback. For example, let us suppose that we run the algorithm from the first episode. In this first episode, we randomly select actions since there is no previously computed data on which basis we can estimate . We assume that the initial value of is zero for all the states and actions. Then, after the first episode is completed, we can obtain an estimate of for the visited states. Now, if we follow the greedy approach, in the second episode we will select the actions that are taken in the first episode. This is because in the first episode, only pairs (S,A) that are visited are non-zero and all other pairs are zero. Due to this, the same set of actions will be selected in all subsequent episodes. Consequently, we might not be able to compute the optimal policy. We use an epsilon-greedy approach to deal with this problem. In the epsilon greedy policy, we do the following. First, we select a small number
and it is achieved for the action 1. Consequently, we choose the action in state 6. This is the main idea of the greedy approach. In every state, select an action that produces the maximum value of the action value function. However, this greedy approach has one drawback. For example, let us suppose that we run the algorithm from the first episode. In this first episode, we randomly select actions since there is no previously computed data on which basis we can estimate . We assume that the initial value of is zero for all the states and actions. Then, after the first episode is completed, we can obtain an estimate of for the visited states. Now, if we follow the greedy approach, in the second episode we will select the actions that are taken in the first episode. This is because in the first episode, only pairs (S,A) that are visited are non-zero and all other pairs are zero. Due to this, the same set of actions will be selected in all subsequent episodes. Consequently, we might not be able to compute the optimal policy. We use an epsilon-greedy approach to deal with this problem. In the epsilon greedy policy, we do the following. First, we select a small number  (let us say smaller than 0.3)
(let us say smaller than 0.3)
- Draw a random number from 0 to 1.
- If this number is smaller than a user-defined number
 , then we randomly select an action in a certain state .
, then we randomly select an action in a certain state . - On the other hand, if this number is larger than , we select an action that maximizes the action value function in the particular state.
This is the epsilon-greedy learning approach. It enables us to deviate from the greedy approach by performing exploration. Exploration is a fancy word used to denote random actions. Now in practice, we use an epsilon greedy approach for the first let us say  episodes, and after after which we learn the environment model sufficiently accurately, we need to start decreasing gradually. This can for example be achieved as follows
episodes, and after after which we learn the environment model sufficiently accurately, we need to start decreasing gradually. This can for example be achieved as follows
(6) 
In this way, we ensure that after we learn the model sufficiently accurately, we start to explore less and less in order to ensure that we converge to the static policy.
Here, we have to make one final modification. In practice, during the first  episodes, where is a relatively small number, we randomly select the actions. So, in practice, the procedure for selecting the control actions looks like this
episodes, where is a relatively small number, we randomly select the actions. So, in practice, the procedure for selecting the control actions looks like this
- During the first episodes, we randomly select the actions in every state
- From the episode
 until the episode , we select the actions by using the epsilon-greedy approach.
until the episode , we select the actions by using the epsilon-greedy approach. - After the episode , we slowly decrease the epsilon parameter by using the equation (6).
Python Implementation
The class below implements the SARSA temporal difference learning algorithm.
import numpy as np
class SARSA_Learning:
###########################################################################
# START - __init__ function
###########################################################################
# INPUTS:
# env - Frozen Lake environment
# alpha - step size
# gamma - discount rate
# epsilon - parameter for epsilon-greedy approach
# numberEpisodes - total number of simulation episodes
def __init__(self,env,alpha,gamma,epsilon,numberEpisodes):
self.env=env
self.alpha=alpha
self.gamma=gamma
self.epsilon=epsilon
self.stateNumber=env.observation_space.n
self.actionNumber=env.action_space.n
self.numberEpisodes=numberEpisodes
# this vector is the learned policy
self.learnedPolicy=np.zeros(env.observation_space.n)
# this matrix is the action value function matrix
# its entries are (s,a), where s is the state number and action is the action number
# s=0,1,2,\ldots,15, a=0,1,2,3
self.Qmatrix=np.zeros((self.stateNumber,self.actionNumber))
###########################################################################
# END - __init__ function
###########################################################################
###########################################################################
# START - function for selecting an action: epsilon-greedy approach
###########################################################################
# this function selects an action on the basis of the current state
# INPUTS:
# state - state for which to compute the action
# index - index of the current episode
def selectAction(self,state,index):
# first 100 episodes we select completely random actions to avoid being stuck
if index<100:
return np.random.choice(self.actionNumber)
# Returns a random real number in the half-open interval [0.0, 1.0)
randomNumber=np.random.random()
if index>1000:
self.epsilon=0.9*self.epsilon
# if this condition is satisfied, we are exploring, that is, we select random actions
if randomNumber < self.epsilon:
# returns a random action selected from: 0,1,...,actionNumber-1
return np.random.choice(self.actionNumber)
# otherwise, we are selecting greedy actions
else:
# we return the index where actionValueMatrixEstimate[state,:] has the max value
return np.random.choice(np.where(self.Qmatrix[state,:]==np.max(self.Qmatrix[state,:]))[0])
# here we need to return the minimum index since it can happen
# that there are several identical maximal entries, for example
# import numpy as np
# a=[0,1,1,0]
# np.where(a==np.max(a))
# this will return [1,2], but we only need a single index
# that is why we need to have np.random.choice(np.where(a==np.max(a))[0])
# note that zero has to be added here since np.where() returns a tuple
###########################################################################
# END - function selecting an action: epsilon-greedy approach
###########################################################################
###########################################################################
# START - function for simulating an episode
###########################################################################
def simulateEpisodes(self):
# here we loop through the episodes
for indexEpisode in range(self.numberEpisodes):
# reset the environment at the beginning of every episode
(stateS,prob)=self.env.reset()
# select an action on the basis of the initial state
actionA = self.selectAction(stateS,indexEpisode)
print("Simulating episode {}".format(indexEpisode))
# here we step from one state to another
# this will loop until a terminal state is reached
terminalState=False
while not terminalState:
# here we step and return the state, reward, and boolean denoting if the state is a terminal state
# prime means that it is the next state
(stateSprime, rewardPrime, terminalState,_,_) = self.env.step(actionA)
# next action
actionAprime = self.selectAction(stateSprime,indexEpisode)
if not terminalState:
error=rewardPrime+self.gamma*self.Qmatrix[stateSprime,actionAprime]-self.Qmatrix[stateS,actionA]
self.Qmatrix[stateS,actionA]=self.Qmatrix[stateS,actionA]+self.alpha*error
else:
# in the terminal state, we have Qmatrix[stateSprime,actionAprime]=0
error=rewardPrime-self.Qmatrix[stateS,actionA]
self.Qmatrix[stateS,actionA]=self.Qmatrix[stateS,actionA]+self.alpha*error
stateS=stateSprime
actionA=actionAprime
###########################################################################
# END - function for simulating an episode
###########################################################################
###########################################################################
# START - function for computing the final policy
###########################################################################
def computeFinalPolicy(self):
# now we compute the final learned policy
for indexS in range(self.stateNumber):
# we use np.random.choice() because in theory, we might have several identical maximums
self.learnedPolicy[indexS]=np.random.choice(np.where(self.Qmatrix[indexS]==np.max(self.Qmatrix[indexS]))[0])
###########################################################################
# END - function for computing the final policy
###########################################################################
The function __init__() in the code lines 16 to 30 takes as input arguments: environment (env), step size (alpha), discount rate (gamma), epsilon parameter, and total number of episodes that we will simulate (numberEpisodes). It initializes the vector “self.learnedPolicy”. This vector is the learned policy that is computed by the function “computeFinalPolicy” on the code lines 127-132. It has 16 entries and its i-th entry is the action that has to be take in the state  . Then it also initializes the matrix “self.Qmatrix”. Entry
. Then it also initializes the matrix “self.Qmatrix”. Entry  of this matrix is the value of the action value function in the pair (s,a). That is, this matrix stores all the Q(S,A) values. The function “simulateEpisodes(self)” defined in the code lines 82-117 simulates an episode and updated the action value functions according to the equations (1) and (2). In this function, we call the function “selectAction(self,state,index)”, defined in the code lines 44 to 72, that implements the epsilon-greedy policy according to the previously explained procedure. Finally, the function “computeFinalPolicy(self)” defined in the code lines 127-132 computes the final learned policy “learnedPolicy”.
of this matrix is the value of the action value function in the pair (s,a). That is, this matrix stores all the Q(S,A) values. The function “simulateEpisodes(self)” defined in the code lines 82-117 simulates an episode and updated the action value functions according to the equations (1) and (2). In this function, we call the function “selectAction(self,state,index)”, defined in the code lines 44 to 72, that implements the epsilon-greedy policy according to the previously explained procedure. Finally, the function “computeFinalPolicy(self)” defined in the code lines 127-132 computes the final learned policy “learnedPolicy”.
The driver code given below explains how to use this class in practice.
'''
# Note:
# You can either use gym (not maintained anymore) or gymnasium (maintained version of gym)
# tested on
# gym==0.26.2
# gym-notices==0.0.8
#gymnasium==0.27.0
#gymnasium-notices==0.0.1
# classical gym
import gym
# instead of gym, import gymnasium
# import gymnasium as gym
import numpy as np
import time
from functions import SARSA_Learning
# create the environment
# is_slippery=False, this is a completely deterministic environment,
# uncomment this if you want to render the environment during the solution process
# however, this will slow down the solution process
#env=gym.make('FrozenLake-v1', desc=None, map_name="4x4", is_slippery=False,render_mode="human")
# here we do not render the environment for speed purposes
env=gym.make('FrozenLake-v1', desc=None, map_name="4x4", is_slippery=False)
env.reset()
# render the environment
# uncomment this if you want to render the environment
#env.render()
# this is used to close the rendered environment
#env.close()
# investigate the environment
# observation space - states
env.observation_space
env.action_space
# actions:
#0: LEFT
#1: DOWN
#2: RIGHT
#3: UP
# define the parameters
# step size
alpha=0.1
# discount rate
gamma=0.9
# epsilon-greedy parameter
epsilon=0.2
# number of simulation episodes
numberEpisodes=10000
# initialize
SARSA1= SARSA_Learning(env,alpha,gamma,epsilon,numberEpisodes)
# simulate
SARSA1.simulateEpisodes()
# compute the final policy
SARSA1.computeFinalPolicy()
# extract the final policy
finalLearnedPolicy=SARSA1.learnedPolicy
# simulate the learned policy for verification
while True:
# to interpret the final learned policy you need this information
# actions: 0: LEFT, 1: DOWN, 2: RIGHT, 3: UP
# let us simulate the learned policy
# this will reset the environment and return the agent to the initial state
env=gym.make('FrozenLake-v1', desc=None, map_name="4x4", is_slippery=False,render_mode='human')
(currentState,prob)=env.reset()
env.render()
time.sleep(2)
# since the initial state is not a terminal state, set this flag to false
terminalState=False
for i in range(100):
# here we step and return the state, reward, and boolean denoting if the state is a terminal state
if not terminalState:
(currentState, currentReward, terminalState,_,_) = env.step(int(finalLearnedPolicy[currentState]))
time.sleep(1)
else:
break
time.sleep(0.5)
env.close()
First, we import the Gym library and create the Frozen Lake environment. Note here that instead of using Gym environment, we can also use the Gymnasium environment. Then, we define the parameters.
We initialize, simulate, and compute the final learned policy of the environment by using the following code lines
# initialize
SARSA1= SARSA_Learning(env,alpha,gamma,epsilon,numberEpisodes)
# simulate
SARSA1.simulateEpisodes()
# compute the final policy
SARSA1.computeFinalPolicy()
Then, we simulate and visualize the learned policy by using the code given below. This code will open the Frozen Lake simulation window and simulate the learned policy as an animation.
# extract the final policy
finalLearnedPolicy=SARSA1.learnedPolicy
# simulate the learned policy for verification
while True:
# to interpret the final learned policy you need this information
# actions: 0: LEFT, 1: DOWN, 2: RIGHT, 3: UP
# let us simulate the learned policy
# this will reset the environment and return the agent to the initial state
env=gym.make('FrozenLake-v1', desc=None, map_name="4x4", is_slippery=False,render_mode='human')
(currentState,prob)=env.reset()
env.render()
time.sleep(2)
# since the initial state is not a terminal state, set this flag to false
terminalState=False
for i in range(100):
# here we step and return the state, reward, and boolean denoting if the state is a terminal state
if not terminalState:
(currentState, currentReward, terminalState,_,_) = env.step(int(finalLearnedPolicy[currentState]))
time.sleep(1)
else:
break
time.sleep(0.5)
env.close()