 by
by 1. Introduction
In this post and in the accompanying YouTube tutorial, we provide explanations of transient response specifications: peak time, settling time, rise time, overshoot, and percent overshoot. The YouTube video accompanying this post is given below.
The values of peak time, settling time, rise time, and percent overshoot are very important for control design. We often specify the desired system behavior in terms of the values of these parameters of the transient response. Then, on the basis of the desired values of these parameters, we design the control system. Also, for second-order systems, we can relate damping ratio, natural frequency, bandwidth, and some other properties of the dynamical systems with the values of peak time, settling time, rise time, and percent overshoot.
In this post, we formally define the peak time, settling time, rise time, and percent overshoot and we provide graphical explanations of these important parameters.
How to Cite This Document:
“Transient Response Specifications: Peak time, Settling time, Rise Time, Overshoot, and Percent Overshoot”. Technical Report, Number 4, Aleksandar Haber, (2023), Publisher: www.aleksandarhaber.com, Link: https://aleksandarhaber.com/transient-response-specifications-peak-time-settling-time-rise-time-and-percent-overshoot/
Compute the Transient Response in MATLAB
The step response that is shown in the figures below is computed for the following system
(1) 
The step response is computed by using the following MATLAB code
zeta=0.4
wn=2
transferFunction= tf([wn^2],[1 2*zeta*wn wn^2])
[y,time1]=step(transferFunction)
plot(time1,y)
2. Settling time
Settling time, denoted by  is graphically explained in Fig. 1. below. The final or steady-state value of the system response is denoted by
is graphically explained in Fig. 1. below. The final or steady-state value of the system response is denoted by  .
.
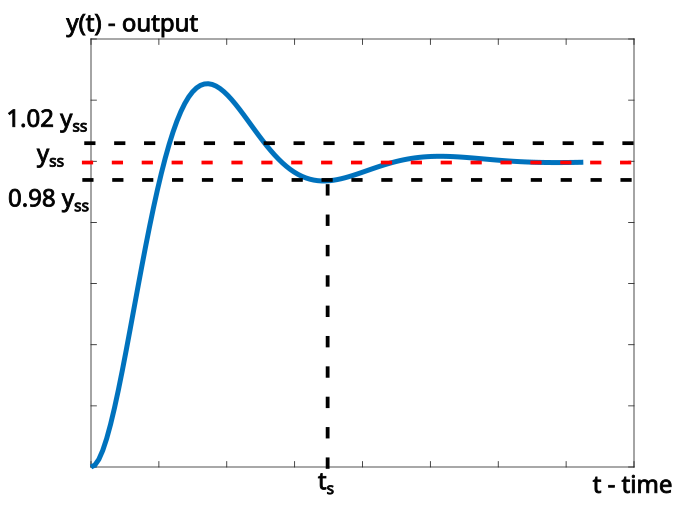
Definition of  settling time: The settling time is defined as the time required for the transient response to enter and stay within
settling time: The settling time is defined as the time required for the transient response to enter and stay within  of the steady-state or final value.
of the steady-state or final value.
Here are a few important comments about the settling time. First of all, in a similar manner and spirit to the above definition, we can also define  settling time. Then, obviously, the definition of the settling time implicitly assumes that the system reaches a finite steady state. This implicitly implies that the underlying system is asymptotically stable. As is demonstrated in Fig. 1, we can construct the settling time by first drawing a horizontal line starting from the steady-state value of the response. Then, we offset this line to obtain an interval or a tunnel. Then we search for an intersection of the system response with the horizontal line such that the response enters and never leaves the tunnel after the intersection point. The time corresponding to the intersection point is our settling time.
settling time. Then, obviously, the definition of the settling time implicitly assumes that the system reaches a finite steady state. This implicitly implies that the underlying system is asymptotically stable. As is demonstrated in Fig. 1, we can construct the settling time by first drawing a horizontal line starting from the steady-state value of the response. Then, we offset this line to obtain an interval or a tunnel. Then we search for an intersection of the system response with the horizontal line such that the response enters and never leaves the tunnel after the intersection point. The time corresponding to the intersection point is our settling time.
Finally, the settling time, as well as other transient response parameters defined in this post can also be defined for not only second-order systems but for systems of arbitrary orders.
3. Peak Time
The peak time is another important characteristic of the transient system response. It is usually defined as follows:
Definition of the peak time: The peak time, denoted by  is defined as the time required for the system to reach the maximum overshoot.
is defined as the time required for the system to reach the maximum overshoot.
The peak time is illustrated in Fig. 2. below.
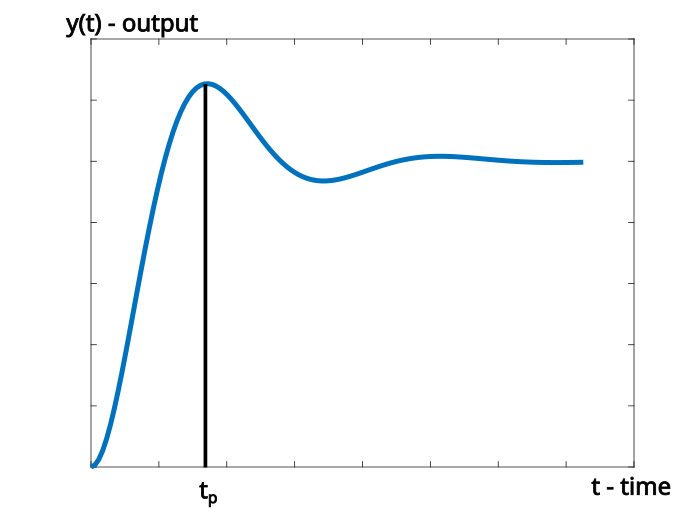
Figure 2: Graphical explanation of the peak time of the transient response.
4. Rise Time
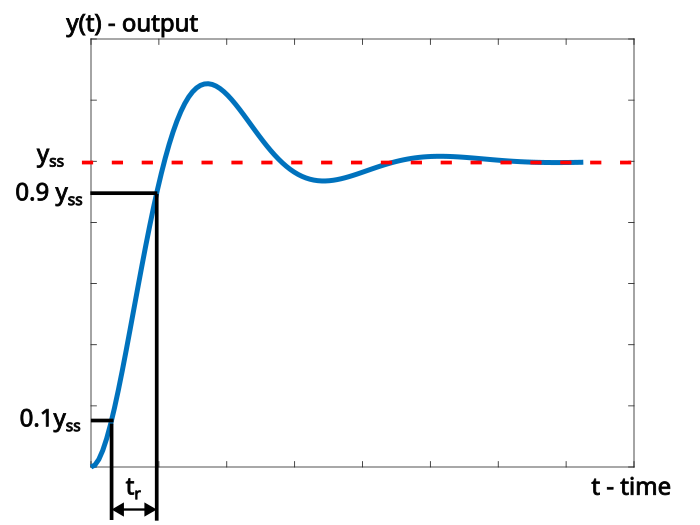
Definition of the rise time: The rise time is the time required for the system response to go from  to
to  of its final or steady-state value.
of its final or steady-state value.
The rise time is explained in Fig. 3 below. The final or steady-state value of the system response is denoted by .  and
and  of the final values are denoted by
of the final values are denoted by  and
and  , respectively.
, respectively.
5. Overshoot and percentage overshoot
The maximum overshoot can be defined as follows:
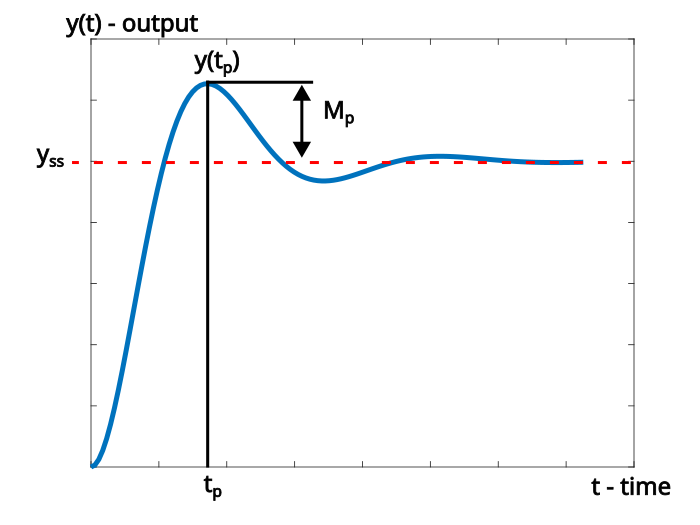
Definition of the (maximum) overshoot: The (maximum) overshoot, denoted by  is defined by
is defined by
(2) 
where is the peak time for which the step response achieves a maximum value, and is the final or the steady value of the step response. The (maximum) overshoot is illustrated in Fig. 4 below.
Definition of the (maximum) percentage overshoot: The (maximum) percentage overshoot, denoted by  is defined by
is defined by
(3) 