 by
by In this post, we explain:
- How to derive rotation matrices
- How to transform vectors between two rotated coordinate systems.
A YouTube video accompanying this post is given below.
Rotation matrices are important for modeling robotic systems and for solving a number of problems in robotics.
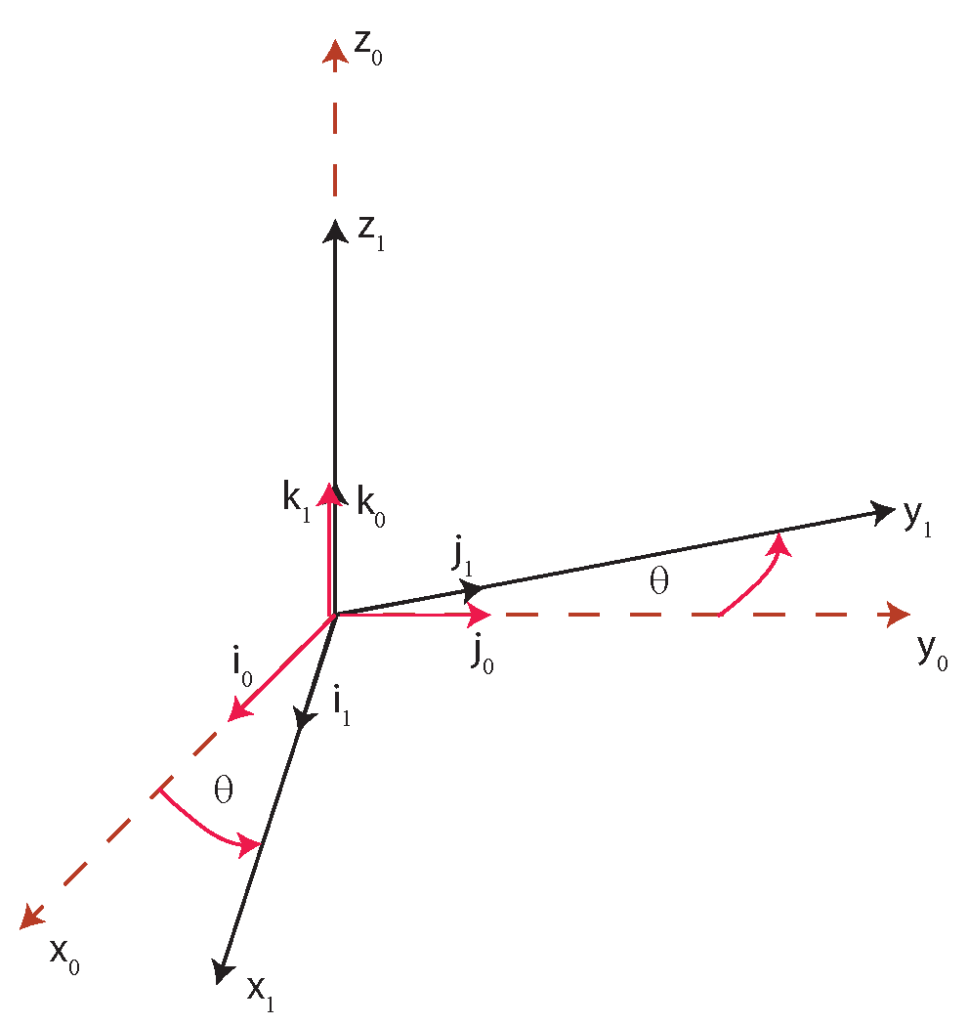
Consider Fig. 1 below.
 around the
around the  axis.
axis.We have two coordinate systems. The coordinate system  is fixed. This coordinate system is called the inertial or reference coordinate system. Note that in robotics, coordinate systems are also called frames. The coordinate system
is fixed. This coordinate system is called the inertial or reference coordinate system. Note that in robotics, coordinate systems are also called frames. The coordinate system  is rotated for the angle with respect to the coordinate system around the axis. The vectors
is rotated for the angle with respect to the coordinate system around the axis. The vectors  ,
,  , and
, and  are the unit vectors of the coordinate axes
are the unit vectors of the coordinate axes  ,
,  , and
, and  . On the other hand, the vectors
. On the other hand, the vectors  ,
,  , and
, and  are the unit vectors of the coordinate axes
are the unit vectors of the coordinate axes  ,
,  , and
, and  .
.
Consider the vector  that rotates together with the frame and that is fixed with respect to this frame. This vector is shown in the figure below.
that rotates together with the frame and that is fixed with respect to this frame. This vector is shown in the figure below.
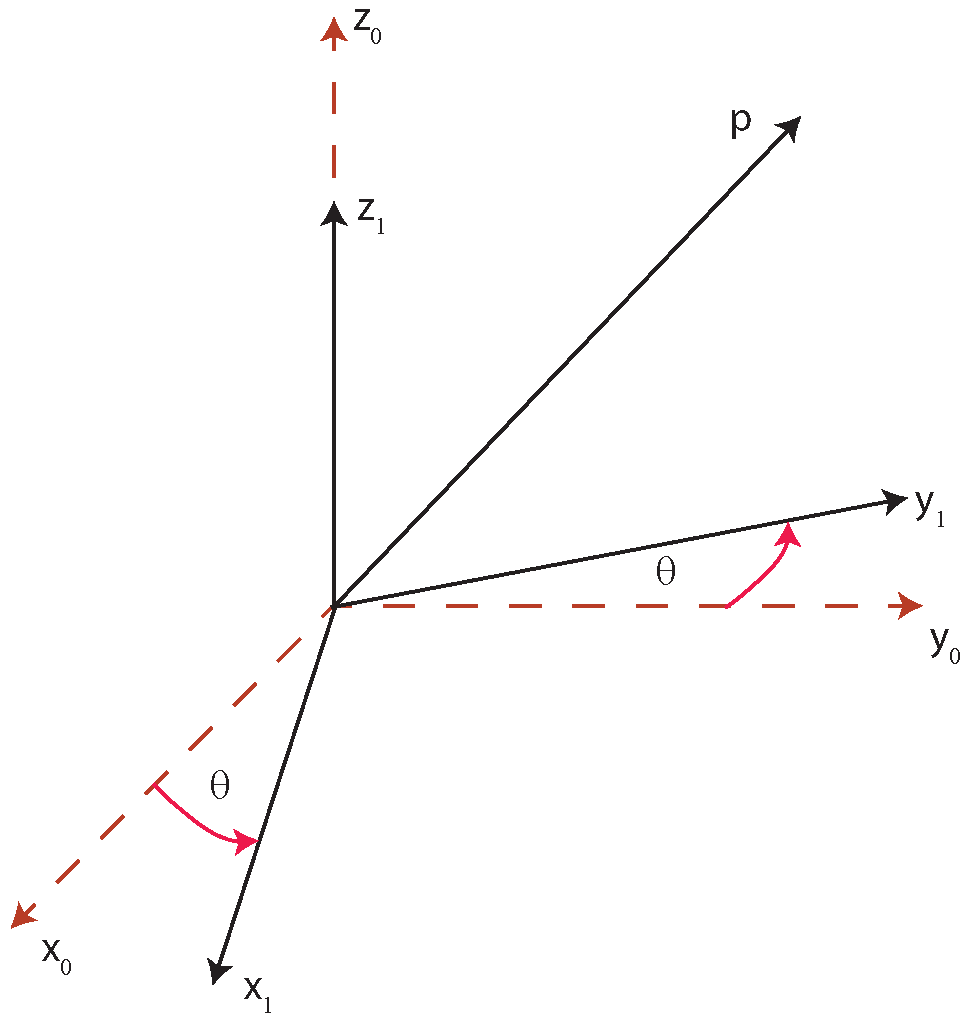
 rotating together with the frame .
rotating together with the frame .Problem: Knowing the coordinates of the vector in the frame , and the angle of rotation , represent this vector in the frame  .
.
The representation of the vector in the frame is
(1) 
where the notation  stands for the representation of the vector in the frame
stands for the representation of the vector in the frame  . And the scalars
. And the scalars  ,
,  , and
, and  are the projections. We want to compute this representation of the vector in the frame
are the projections. We want to compute this representation of the vector in the frame
(2) 
(3) 
where the notation  is used to denote the scalar product between vectors. The last equation can be represented in the vector form
is used to denote the scalar product between vectors. The last equation can be represented in the vector form
(4) 
where
(5) 
is the rotation matrix. The notation  denotes the transformation from the frame (subscript) to the frame
denotes the transformation from the frame (subscript) to the frame  (superscript). The first column of the rotation matrix is the projection of the vector
(superscript). The first column of the rotation matrix is the projection of the vector  onto the axes of the frame . The second column of the rotation matrix is the projection of the vector
onto the axes of the frame . The second column of the rotation matrix is the projection of the vector  onto the axes of the frame . The third column of the rotation matrix is the projection of the vector
onto the axes of the frame . The third column of the rotation matrix is the projection of the vector  onto the axes of the frame .
onto the axes of the frame .
Now, consider Fig.1 again. Since and  are the unit vectors, we have
are the unit vectors, we have  . That is, is the projection of the vector onto the vector , and is the angle between these two vectors. By using this method, we can populate the rotation matrix as follows:
. That is, is the projection of the vector onto the vector , and is the angle between these two vectors. By using this method, we can populate the rotation matrix as follows:
(6) 
Rotation matrices have the following nice property:
(7) 
That is, they are orthonormal. The inverse of is actually a transformation from the frame to the frame , to see this, multiply the equation (4) by  :
:
(8) 
That is,  .
.