 by
by
In this post, we introduce the root locus technique. This technique is used to quickly sketch the locations of the closed loop poles when a parameter of the feedback system is varied. We explain a procedure for sketching a root locus graph.
Among other benefits, the root locus graph is very useful for selecting the control parameter(s) that will ensure
– That the closed-loop system is stable.
– That the closed loop system response has a prescribed damping ratio and natural frequency.
The closed-loop system is shown in Fig. 1 below.
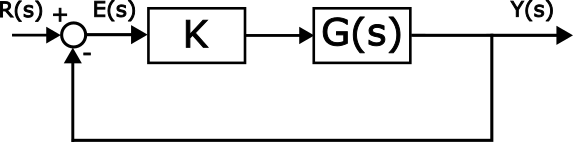
In Fig. 1,  is the reference signal in the Laplace domain,
is the reference signal in the Laplace domain,  is the error in the Laplace domain,
is the error in the Laplace domain,  is the output in the Laplace domain,
is the output in the Laplace domain,  is the transfer function of the plant, and
is the transfer function of the plant, and  is a control parameter that we want to design such that the closed loop system is stable and such that predefined tracking performance is satisfied. We assume that the transfer function can be represented as follows
is a control parameter that we want to design such that the closed loop system is stable and such that predefined tracking performance is satisfied. We assume that the transfer function can be represented as follows
(1) 
where  is a polynomial of degree
is a polynomial of degree  and
and  is a polynomial of degree
is a polynomial of degree  . We assume that
. We assume that  (this is a standard assumption that is often met in practice).
(this is a standard assumption that is often met in practice).
Obviously, the closed-loop transfer function is given by the following equation
(2) 
The poles of the closed-loop system, are determined as the roots of the following equation
(3) 
Obviously, as the parameter  is varied the poles of the system will vary. The root locus of the system can be defined as follows.
is varied the poles of the system will vary. The root locus of the system can be defined as follows.
The root locus is the set of values of  for which (3) is satisfied as goes from
for which (3) is satisfied as goes from  to
to  .
.
So, technically speaking, to construct the root locus, we vary the parameter , and for every value of we compute the poles and plot them in the s complex plane. However, this is a tedious job, since we have an infinite number of poles. Luckily, there are several guidelines that can help us to approximately sketch the root locus by hand. In the sequel, we explain these guidelines by using an example.
First, we explain how to sketch the root locus graph by hand, and then we explain how to use MATLAB to accurately draw the root locus graph.
We consider the following example
(4) 
This is an open-loop transfer function of a plant. The open-loop poles are
(5) 
and the zero is
(6) 
We have  poles and
poles and  zeros.
zeros.
In the sequel, we describe the steps for approximately constructing the root locus graph.
STEP 1:
- Mark poles and zeros on the graph.
- Denote the starting points. The starting points of the root locus graph are obtained for
 . These points are actually poles of the transfer function G(s) (open-loop transfer function).
. These points are actually poles of the transfer function G(s) (open-loop transfer function). - Denote the “obvious” end points of the root locus graph. Some of the end points are the zeros of G(s), and the remaining
 points are at points at infinity (asymptotes of these infinity directions will be determined later).
points are at points at infinity (asymptotes of these infinity directions will be determined later).