by
by
In this tutorial, we explain how to implement an iterative policy evaluation algorithm in Python. This tutorial is part of a series of tutorials on reinforcement learning. The YouTube tutorial accompanying this post is given below.
Required Previous Knowledge
Before reading this tutorial you should go over the following tutorials:
- Explanation of the Value Function and its Bellman equation
- Introduction to State Transition Probabilities, Actions, Episodes, and Rewards with OpenAI Gym Python Library
- Introduction to OpenAI Gym library
Motivation
The iterative policy evaluation algorithm is used in reinforcement learning algorithms to iteratively calculate the value function in certain states.
Test Example
To test the performance of the iterative policy evaluation algorithm, we consider the Frozen Lake environment in OpenAI Gym. A detailed tutorial dedicated to the OpenAI Gym and Frozen Lake environment can be found here. This environment is illustrated in Fig. 1. below

This environment consists of 16 fields (4 by 4 grid). These fields are enumerated in the Figure 2 below.
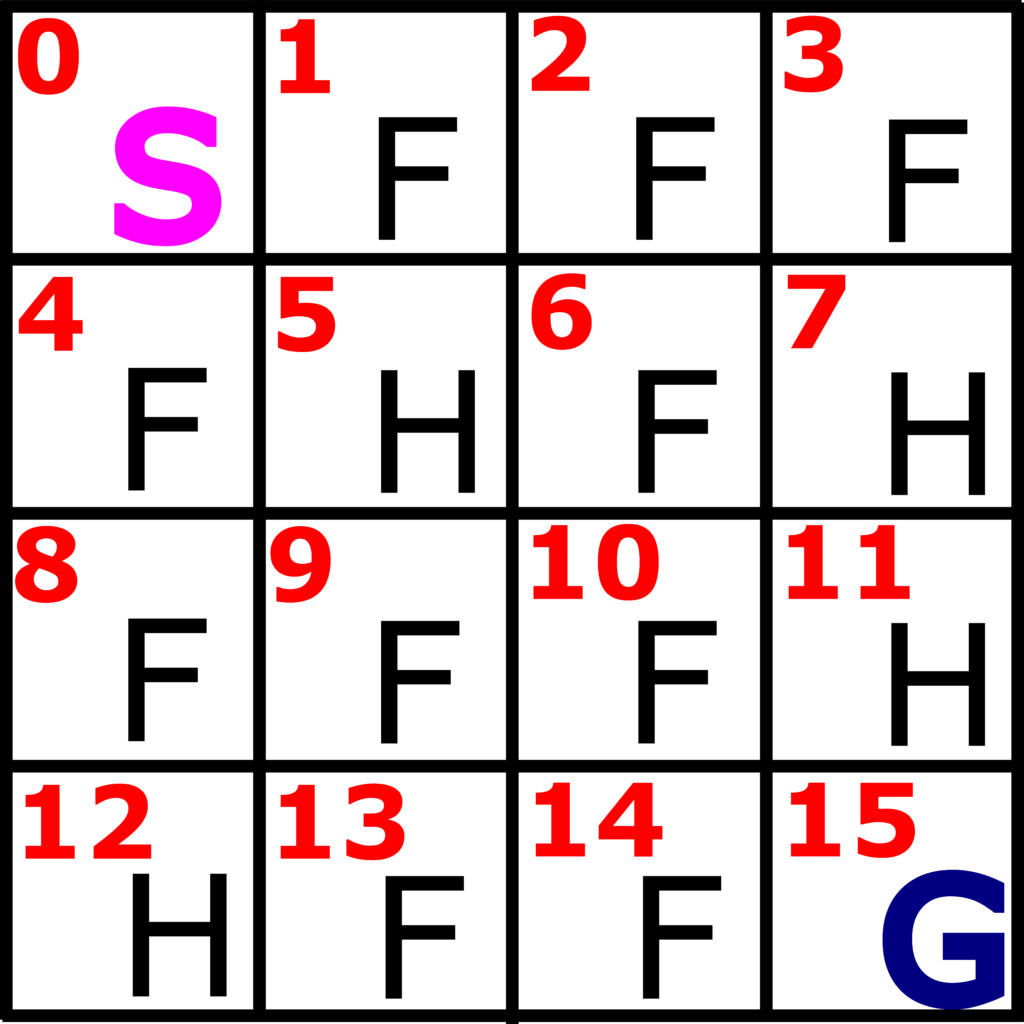
There are four types of fields: start field (S), frozen fields (F), holes (H), and the goal field (G). The goal of the game is to reach the goal field G, starting from the start field S and by avoiding the hole fields. If the player steps on the frozen field, the player ends the game. That is, the game is completed if we step on a hole field or if we reach the goal field. A state or an observation is the current field. The states are denoted from 0 to 15.
We receive the reward of 0 if we step on the frozen or hole fields. On the other hand, we receive the reward of 1, if we step on the goal field. In any internal state (not close to the boundary) that is not a terminal state, we have 4 possible actions: UP, DOWN, LEFT, and RIGHT.
Brief Summary of the Value Function
Definition of the value function: The value function of a particular state  under the policy
under the policy  , denoted by
, denoted by  , is the expectation of the return
, is the expectation of the return  obtained by following the policy and starting from the state :
obtained by following the policy and starting from the state :
(1) ![\begin{align*}v_{\pi}(s)=E_{\pi}[G_{t}|S_{t}=s]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-145b4d0cdc0a24b5e3bdaf84cae7dcf1_l3.png "Rendered by QuickLaTeX.com")
here ![E_{\pi}[\cdot]](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-d8ca3e5443f3f8c37be84d5af753d326_l3.png "Rendered by QuickLaTeX.com") denotes the expected value of the random variable obtained under the assumption that the agent follows the policy . The value function of the terminal state is defined to be zero. Also, the value function is often called the state-value function for the policy .
denotes the expected value of the random variable obtained under the assumption that the agent follows the policy . The value function of the terminal state is defined to be zero. Also, the value function is often called the state-value function for the policy .
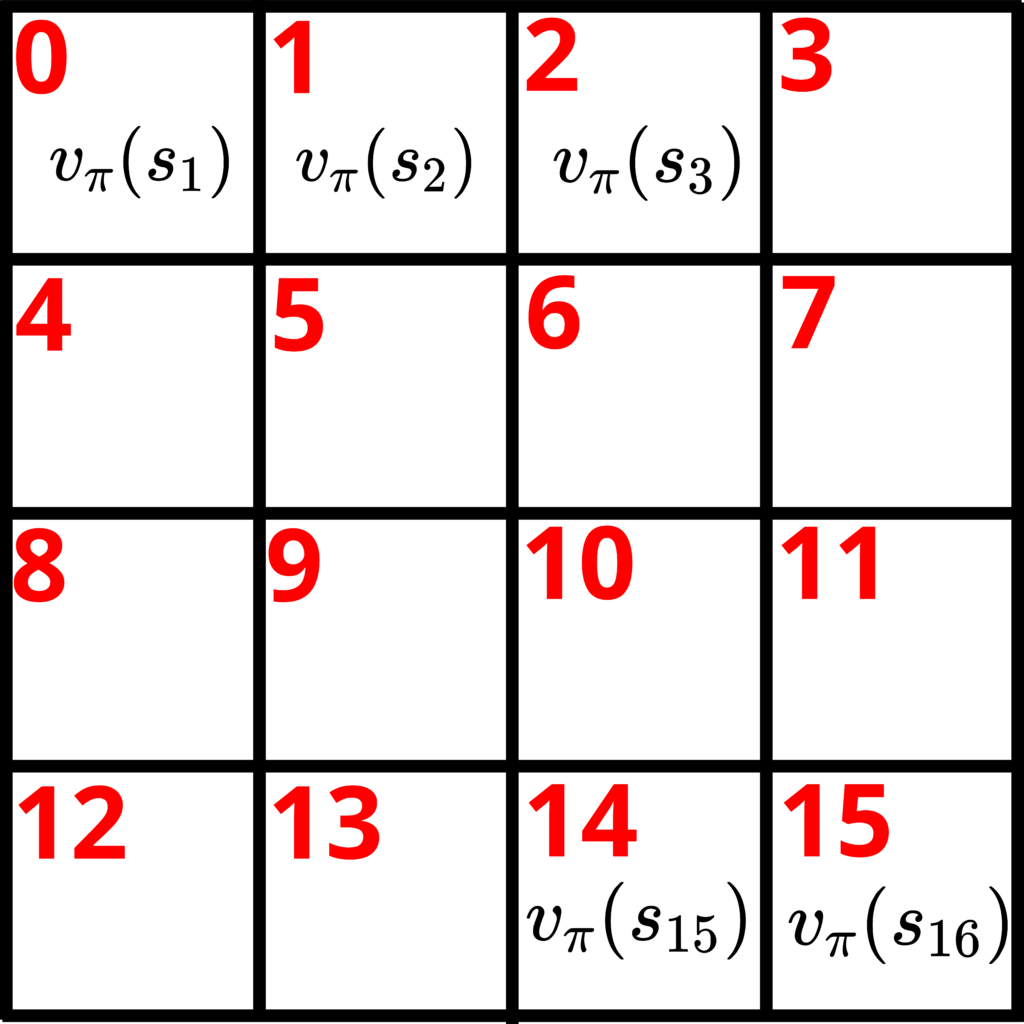
Let us consider again the Frozen lake example. To every field, that is, to every state  , we can associate the value function. This is shown in Fig. 3 below.
, we can associate the value function. This is shown in Fig. 3 below.
 ,
,  ,
,  ,
,  , and
, and  .
.A very important equation that enables us to iteratively compute the value function is the Bellman equation for the state value function .
Bellman equation for the state value function : Let  be the state at the time instant
be the state at the time instant  , and be the state at the time instant . Then, it can be shown that
, and be the state at the time instant . Then, it can be shown that
(2) ![\begin{align*}v_{\pi}(s) & =E_{\pi}[G_{t}|S_{t}=s] \\v_{\pi}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-b73654d861dc49f013a4f2ca6f4a5898_l3.png "Rendered by QuickLaTeX.com")
where
 is the particular value of the reward obtained by reaching and
is the particular value of the reward obtained by reaching and  is the state value function at .
is the state value function at . is the action performed in the state
is the action performed in the state  is the (control) policy, that is, the probability of selecting action when in the state
is the (control) policy, that is, the probability of selecting action when in the state  is the dynamics of the Markov decision process:
is the dynamics of the Markov decision process: (3)

Iterative Policy Evaluation Algorithm
The goal is to compute the value function for every state expressed by using the Bellman equation
(4) ![\begin{align*}v_{\pi}(s) & =E_{\pi}[G_{t}|S_{t}=s] \\v_{\pi}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-9976bc6dddf2192b4d1cc044a95ea010_l3.png "Rendered by QuickLaTeX.com")
Assuming that we have  states , and by writing the Bellman equation for every state, we can obtain a system of linear equations where the unknowns are the states. By solving this system, we can compute the state value functions for every state. An alternative approach for computing the value functions is to use an iterative method. We can transform (4) into the following iteration:
states , and by writing the Bellman equation for every state, we can obtain a system of linear equations where the unknowns are the states. By solving this system, we can compute the state value functions for every state. An alternative approach for computing the value functions is to use an iterative method. We can transform (4) into the following iteration:
(5) ![\begin{align*}v_{\pi,k+1}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi,k}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-bef4084bb97c04b89593b25396340d0d_l3.png "Rendered by QuickLaTeX.com")
where  is the iteration index, and
is the iteration index, and  is the value function computed at the iteration
is the value function computed at the iteration  and
and  is the value function computed at the iteration .
is the value function computed at the iteration .
The iteration (5) is the core of the iterative policy evaluation algorithm. At the iteration  , we simply initialize the iteration with a guess of the value functions
, we simply initialize the iteration with a guess of the value functions  for every state, and we propagate the iteration until convergence. Here, it should be emphasized that the value functions for the terminal states (holes and the goal state in the Frozen Lake examples) should be initialized as zeros.
for every state, and we propagate the iteration until convergence. Here, it should be emphasized that the value functions for the terminal states (holes and the goal state in the Frozen Lake examples) should be initialized as zeros.
Let  , be the vector whose entries are value functions for the corresponding states. That is,
, be the vector whose entries are value functions for the corresponding states. That is,
(6) 
where  is the value function at the state
is the value function at the state  computed at the iteration . Then, we can stop the iteration when
computed at the iteration . Then, we can stop the iteration when  , where
, where  is an absolute value, and
is an absolute value, and  is the convergence tolerance (a relatively small number).
is the convergence tolerance (a relatively small number).
Python Implementation of the Iterative Policy Evaluation Algorithm
In our particular example, in (4) the sum over the rewards does not exist since the rewards are deterministic. That is, we always obtain the same rewards when reaching the final state . That is,  , where
, where  is the transition probability. Consequently, iteration becomes
is the transition probability. Consequently, iteration becomes
(7) ![\begin{align*}v_{\pi,k+1}(s) & = \underbrace{\sum_{a} \pi(a|s) \underbrace{\sum_{s'}p(s'|s,a)[r+\gamma v_{\pi,k}(s')]}_{\text{inner sum}}}_{\text{outer sum}} \end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-8f0a118a789bcfd03c3d13df7b2b0e3f_l3.png "Rendered by QuickLaTeX.com")
Furthermore, in every state , we assume that all the actions are equally possible. That is  ,
,  (actions are UP, DOWN, LEFT, and RIGHT).
(actions are UP, DOWN, LEFT, and RIGHT).
The first step is to import the necessary libraries and to import the Frozen Lake environment:
import gym
import matplotlib.pyplot as plt
import seaborn as sns
import numpy as no
env=gym.make("FrozenLake-v1", render_mode="human")
env.reset()
# render the environment
env.render()
env.close()
We can render the environment by calling env.render(). However, we do not need a graphical representation of the environment in this post. Consequently, we closed the graphical representation by typing: env.close().
We can inspect the observation space, action space, and transition probabilities by using these code lines
# observation space - states
env.observation_space
# actions: left -0, down - 1, right - 2, up- 3
env.action_space
#transition probabilities
#p(s'|s,a) probability of going to state s'
# starting from the state s and by applying the action a
# env.P[state][action]
env.P[0][1] #state 0, action 1
# output is a list having the following entries
# (transition probability, next state, reward, Is terminal state?)
The iterative policy evaluation is implemented as follows
# select the discount factor
discountFactor=0.9
# initialize the value function vector
valueFunctionVector=np.zeros(env.observation_space.n)
# maximum number of iterations
maxNumberOfIterations=1000
# convergence tolerance delta
convergenceTolerance=10**(-6)
# convergence list
convergenceTrack=[]
for iterations in range(maxNumberOfIterations):
convergenceTrack.append(np.linalg.norm(valueFunctionVector,2))
valueFunctionVectorNextIteration=np.zeros(env.observation_space.n)
for state in env.P:
outerSum=0
for action in env.P[state]:
innerSum=0
for probability, nextState, reward, isTerminalState in env.P[state][action]:
#print(probability, nextState, reward, isTerminalState)
innerSum=innerSum+ probability*(reward+discountFactor*valueFunctionVector[nextState])
outerSum=outerSum+0.25*innerSum
valueFunctionVectorNextIteration[state]=outerSum
if(np.max(np.abs(valueFunctionVectorNextIteration-valueFunctionVector))<convergenceTolerance):
valueFunctionVector=valueFunctionVectorNextIteration
print('Converged!')
break
valueFunctionVector=valueFunctionVectorNextIteration
This implementation closely follows (7). We have 3 for loops. The first loop iterates through all the states. The second for loop is the outer loop in (7) . The third loop is the inner loop in the same equations. The vector (6) is implemented as valueFunctionVector.
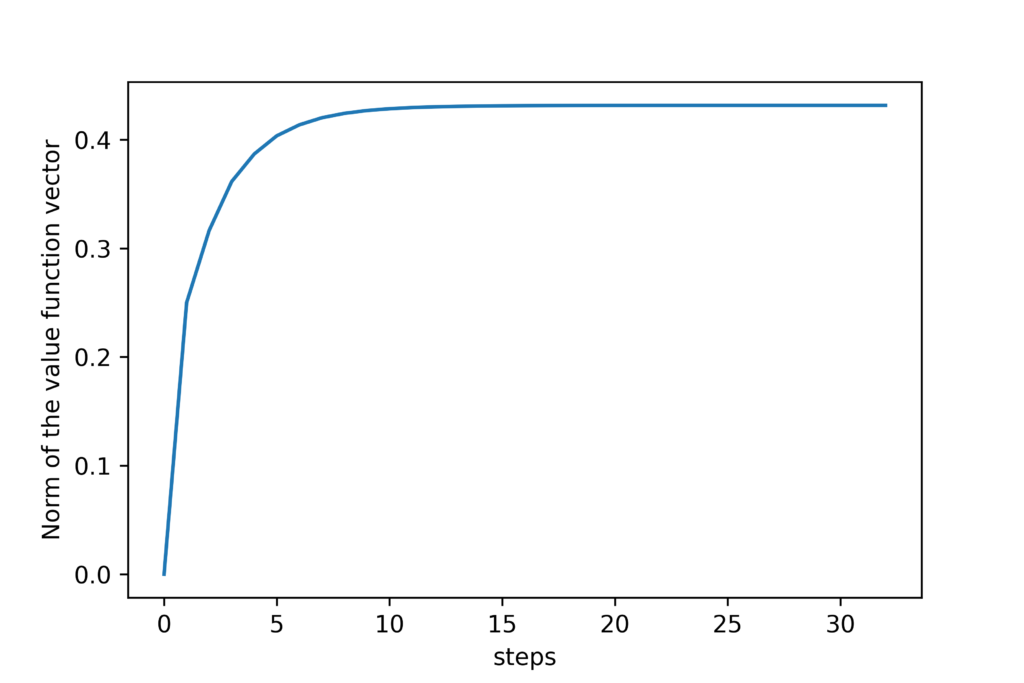
We stop the iteration if the previously explained convergence criterion is satisfied. For visualization purposes, we track the two norm of the vector (6) by using the list convergenceTrack.
We plot the results by using these code lines:
# visualize the state values
def grid_print(valueFunction,reshapeDim):
ax = sns.heatmap(valueFunction.reshape(4,4),
annot=True, square=True,
cbar=False, cmap='Blues',
xticklabels=False, yticklabels=False)
plt.savefig('valueFunctionGrid.png',dpi=600)
plt.show()
grid_print(valueFunctionVector,4)
plt.plot(convergenceTrack)
plt.xlabel('steps')
plt.ylabel('Norm of the value function vector')
plt.savefig('convergence.png',dpi=600)
plt.show()
We plot the computed value functions in Fig. 4.

The number in every field represents the computed value function. We can observe that in the terminal states, the function values are zero. Furthermore, we can observe that the function values decrease as we are further away from the goal state. The figure below shows the convergence of the algorithm.