 by
by Figure shown below illustrates a Pulse Width Modulation (PWM) signal.
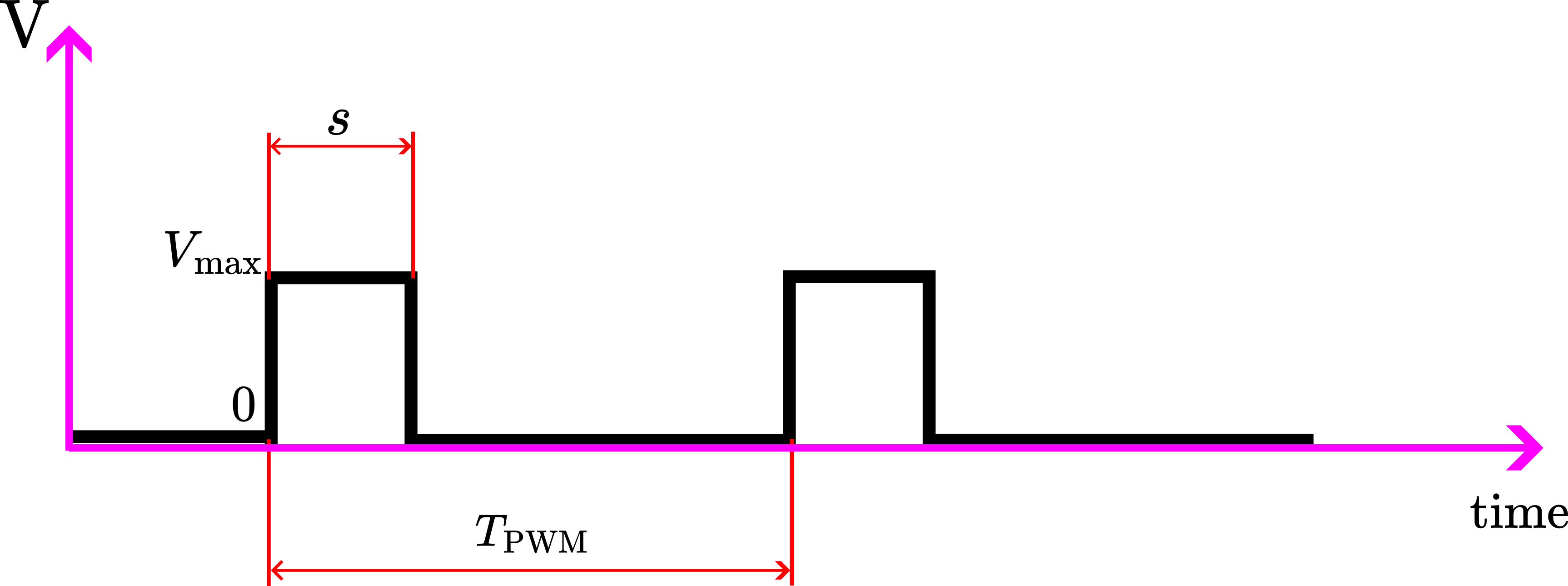
The PWM signal is defined by the following variables
 – length of the pulse
– length of the pulse – period of the PWM signal.
– period of the PWM signal.  – maximal (voltage) value of the PWM signal.
– maximal (voltage) value of the PWM signal.
The frequency of the PWM signal is
(1) 
The duty cycle is defined by
(2) 
In the STM32 development environment, we select the frequency of the PWM signal by using the three parameters  ,
,  , and
, and  , and the following equation
, and the following equation
(3) 
where
- is the frequency of a timer clock of an STM32 microcontroller.
- is the prescaler value.
- is the period value.
The frequency the time clock of the clock is measured in MHz. Usually, every STM32 microcontroller has a maximal value. The prescaler value is used to downscale the frequency of the time clock. The period value is the final parameter that determines the frequency of the PWM signal.
In the STM32CubeIDE development environment:
- The period is called “Auto Reload Register” which is abbreviated by ARR. That is,
 .
.
In the STM32CubeIDE environment, the duty cycle is determined by
(4) 
where  is the Capture/Compare Register (CCR). We select the value of in the interval
is the Capture/Compare Register (CCR). We select the value of in the interval  .
.
Let us illustrate this with an example. Let us suppose that we want to generate a PWM signal with the frequency of 
 . Let us suppose that the time clock frequency is
. Let us suppose that the time clock frequency is 
 . Then, by selecting the prescaler value of
. Then, by selecting the prescaler value of  and the period of
and the period of  , we obtain the desired frequency
, we obtain the desired frequency
(5) 