by
by
In this brief control and signal processing tutorial, we explain
- The basics of the Finite Impulse Response (FIR) filter
- How to implement the FIR filter in the C++ programming language
The YouTube tutorial is given below.
Basics of the Finite Impulse Response (FIR) filter
The Finite Impulse Response (FIR) filter has the following form:
(1) 
where
 ,
,  are the inputs to the FIR filter at the discrete time instant
are the inputs to the FIR filter at the discrete time instant  .
. is the output of the FIR filter at the discrete-time instant .
is the output of the FIR filter at the discrete-time instant . are the FIR filter coefficients.
are the FIR filter coefficients. is the order of the FIR filter.
is the order of the FIR filter.
FIR filters have a large number of applications in control engineering and signal processing. The most simple and maybe the most widely used example is the moving average filter. For  , the moving average filter is
, the moving average filter is
(2) 
where coefficients are
(3) 
To verify the implementation, it is a good idea to expand the filter equation (1) for several values of . We assume and we start from 
(4) 
Finite Impulse Response Implementation in C++
As a test case, we implement a moving average FIR filter of the order  . First, we create a Python file that generates the input data sequence for testing the filter. The first part of the Python file is given below.
. First, we create a Python file that generates the input data sequence for testing the filter. The first part of the Python file is given below.
'''
Python file that
1) Generates a noisy input data for a FIR filter implemented in C++
2) Saves the noisy input data in a txt file
3) Loads the filtered data from a txt file
4) Plots both the input and output data
Author: Aleksandar Haber, PhD
SEE THE LICENSE FILE
'''
# Importing libraries that will be used
import numpy as np
import matplotlib.pyplot as plt
# number of data samples
S=1000
# name of the file to save the input raw data
# this file is an input to the C++ code implementing the FIR filter
input_filename = 'input_data.txt'
# name of the file containing the filtered data
# this file is the output of the FIR filter and it is produced by the C++ code
filtered_filename='output_data.txt'
# create an input array
# input array
input_array=np.zeros(shape=(S,1));
# generate a noisy input data
dt=0.01
for i in range(len(input_array)):
input_array[i,0]=np.sin(i*dt)+0.2*np.random.randn()
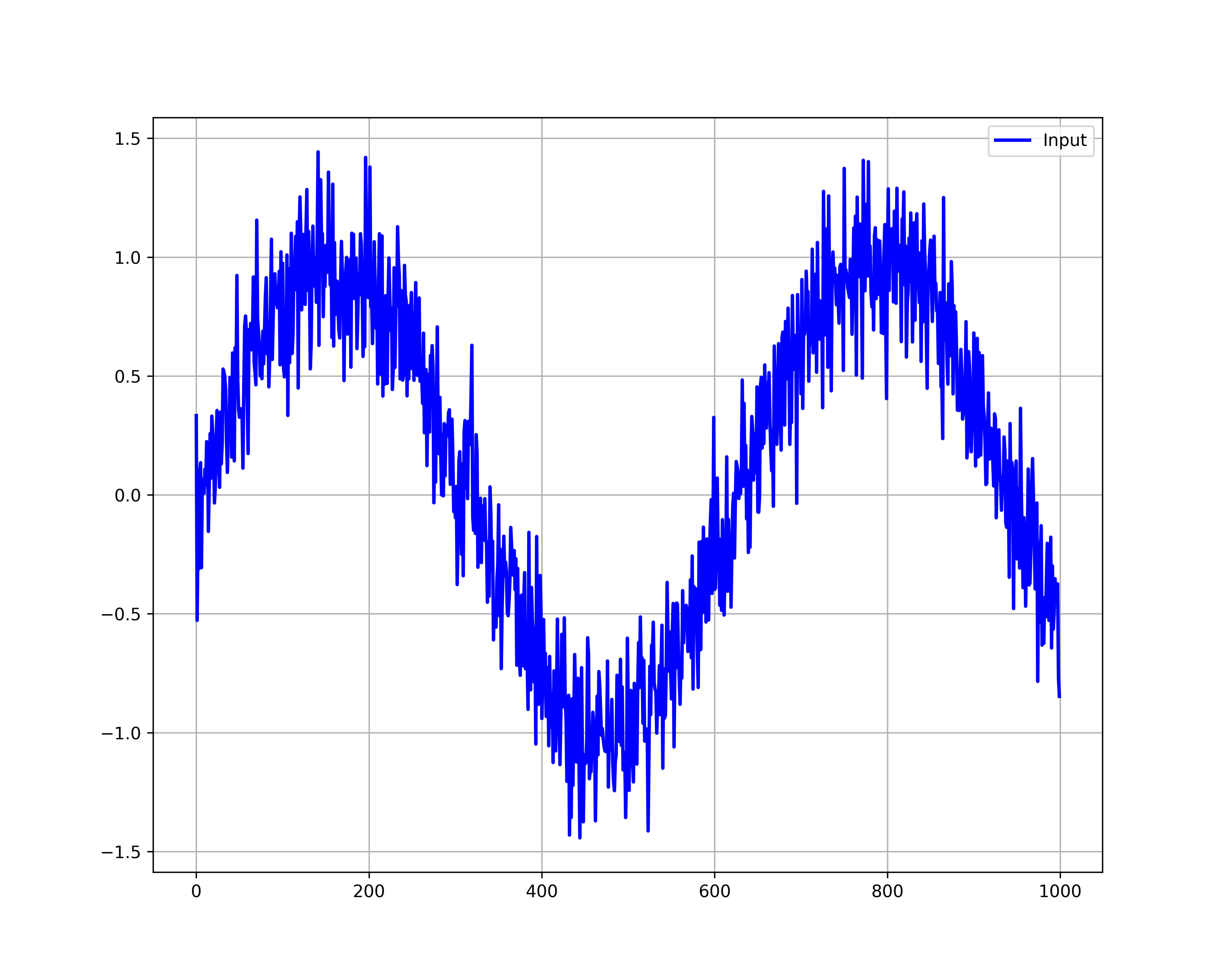
# plot the input array
plt.figure(figsize=(10,6))
plt.plot(input_array, color='blue',linewidth=2, label="Input")
plt.legend()
plt.grid(visible=True)
plt.savefig('input.png',dpi=600)
plt.show()
# Save the array to a text file
np.savetxt(input_filename, input_array) The data is generated and saved in the file whose name is: “input_data.txt”. The generated sequence is shown below.
Next, we write C++ functions. The functions are implemented in the file called “functions.cpp” given below
#include<vector>
#include<iostream>
#include<fstream>
#include<string>
using namespace std;
int load_data(vector<double>& loaded_data,const string& file_name)
{
ifstream inputStream;
double value;
// open the file
inputStream.open(file_name);
if(inputStream.fail())
{
cout<<"Failed to open the input file!"<<endl;
return 1;
}
while(inputStream>>value)
{
loaded_data.push_back(value);
}
inputStream.close();
return 0;
}
int save_data(vector<double>& data, const string& file_name)
{
ofstream outStream;
outStream.open(file_name);
if(outStream.fail())
{
cout<<"Could not open the file"<<endl;
return 1;
}
for(unsigned int i=0; i<data.size(); i++)
{
outStream<<data[i]<<endl;
}
outStream.close();
return 0;
}The function “load_data” is used to load the input data from a data file. The function “save_data” is used to save the filtered data. The C++ code that implements the FIR filter is given below.
#include<vector>
#include<iostream>
#include<fstream>
#include<string>
using namespace std;
#include "functions.cpp"
int main()
{
// input data vector
vector<double> u;
// output vector
vector<double> y;
//filter coefficients
vector<double> b={0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1};
// strings for input and output data files
string file_name_input="input_data.txt";
string file_name_output="output_data.txt";
unsigned int N=b.size()-1;
double output_value;
int status=load_data(u,file_name_input);
if(status==1)
{
exit(1);
}
for(unsigned int k=0; k<u.size(); k++)
{
if (k<=N-1)
{
output_value=0.0;
}
else
{
output_value=0.0;
for (unsigned int j=0; j<=N; j++)
{
output_value=output_value+b[j]*u[k-j];
}
}
y.push_back(output_value);
}
status=save_data(y,file_name_output);
if(status==1)
{
exit(1);
}
return 0;
}This file implements the FIR filter, filters the data, and saves the data in the file called “output_data.txt”. The second part of the Python file given below loads the data from the file called “output_data.txt” and plots them.
#####
# Now, you need to run the C++ code to generate the filtered data
#####
# load the filtered data
output_array = np.loadtxt(filtered_filename)
#plot the output array
plt.figure(figsize=(10,6))
plt.plot(output_array, color='red',linewidth=4, label="Filtered output")
plt.legend()
plt.grid(visible=True)
plt.savefig('filtered_output.png',dpi=600)
plt.show()
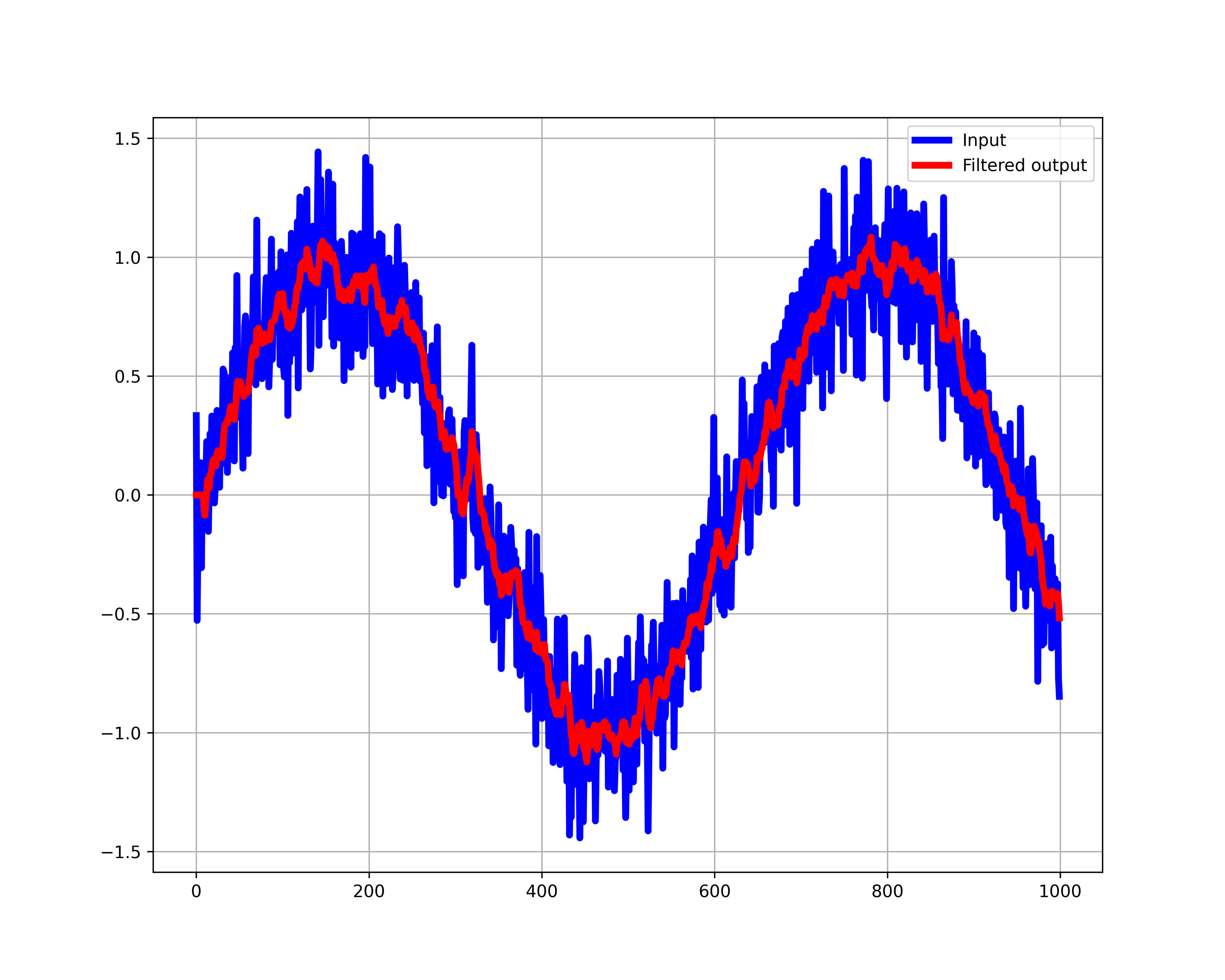
# plot both the input and output array on the same graph for comparison
plt.figure(figsize=(10,6))
plt.plot(input_array, color='blue',linewidth=4, label="Input")
plt.plot(output_array, color='red',linewidth=4, label="Filtered output")
plt.legend()
plt.grid(visible=True)
plt.savefig('input_output.png',dpi=600)
plt.show()
The results are shown below.