by
by In this ROS2 Jazzy and Gazebo and robotics tutorial, we explain how to implement from scratch a potential field method with lidar sensor for robot path planning and obstacle avoidance. We explain how to implement the potential field method for obstacle avoidance of a mobile robot. We explain how to implement the method in Python. We thoroughly explain how to detect obstacles using a lidar and how to compute attractive and repulsive functions and how to implement them in ROS2 and Python. Then, we explain how to simulate the potential field method in Gazebo and ROS2.
The tutorial is given below.
Before watching this tutorial, you need to watch the following tutorials.
- Mobile robot and lidar modeling:
https://www.youtube.com/watch?v=wOa1m8hzrgQ
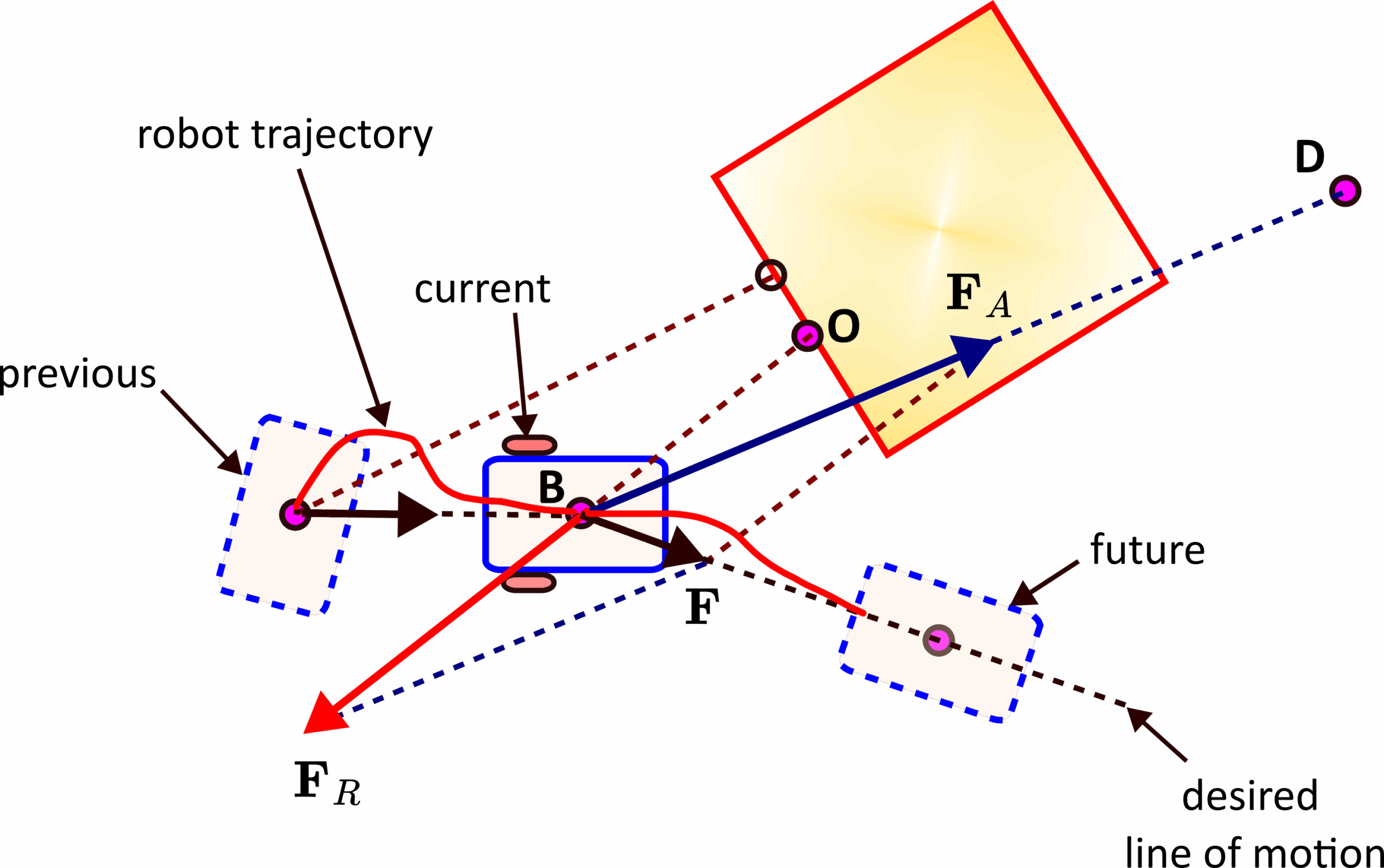
- Mathematical foundations and derivation of the potential field method:
https://www.youtube.com/watch?v=FT5DQ-SGYL4