by
by In this Robot Operating System 2 (ROS2) Jazzy tutorial, we explain
- The basics of tf2 library and coordinate frames.
- How coordinate transformations between frames and links are defined and tracked by using the ROS2 tf2 library.
- How to write a tf2 broadcaster node in C++.
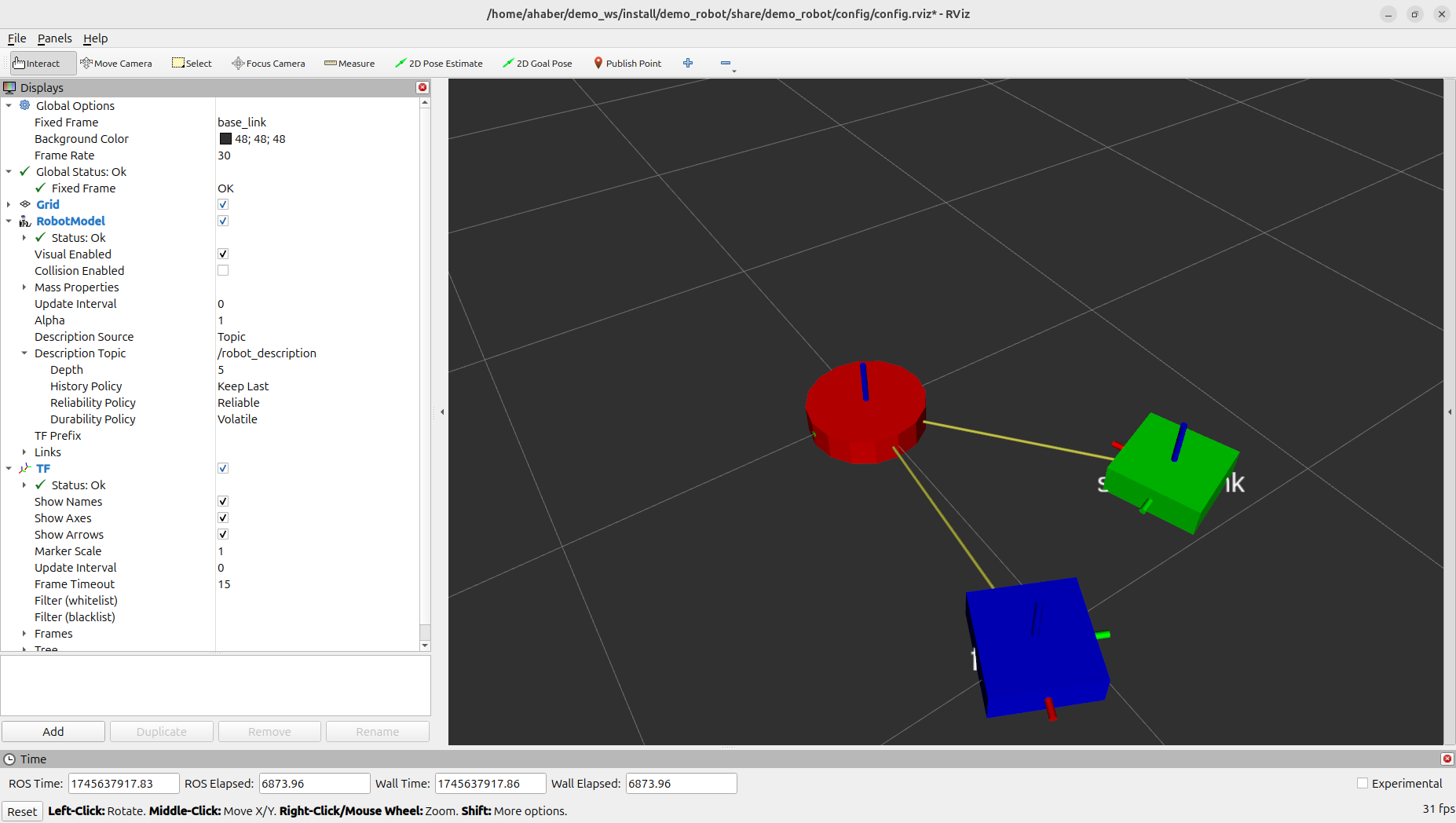
- How to simulate and visualize motion of links and frames in ROS2 Jazzy.
tf2 is a ROS2 transform library enabling us to track position and orientation of coordinate frames over time. By using a tree structure, tf2 tracks relative position and orientation of coordinate frames of a robotic system at any time instant. This library enables us to calculate relative positions and orientations of frames and geometrical objects (points, vectors, quaternions, etc) associated with links and joints. It is one of the most useful ROS2 libraries.
YouTube tutorial: