In this control engineering and control theory tutorial, we provide a brief introduction to Lyapunov stability analysis. The YouTube tutorial accompanying this tutorial is given below.

Motivation for Lyapunov Stability Analysis
Consider the following nonlinear dynamics
(1) 

where 





We want to provide answers to the following questions
- Is the equilibrium point
- Is the equilibrium point
In the case of linear systems, these questions can easily be answered by computing the eigenvalues of the linear system. However, in the case of nonlinear systems, these questions are far from trivial.
There are at least two methods that we can use to answer these questions:
- Lyapunov’s indirect method (also known as Lyapunov’s first method). The main idea of this approach is to linearize the dynamics of the nonlinear system around the equilibrium point and to investigate the stability of the linearized dynamics. If the linearized dynamics is asymptotically stable, then the equilibrium point of the nonlinear system is also asymptotically stable. If the linearized dynamics is not stable, then the equilibrium point of the nonlinear system is also not stable.
- Lyapunov’s direct method (also known as Lyapunov’s second method). This approach is based on finding a scalar function of a state that satisfies certain properties. Namely, this function has to be continuously differentiable and positive definite. If the first derivative of this function with respect to time is negative semidefinite along the state trajectories, then we can conclude that the equilibrium point is stable. On the other hand, if the first derivative along state trajectories is negative definite then the equilibrium point is asymptotically stable.
This tutorial is dedicated to the practical application of Lyapunov’s direct method. Before reading this tutorial it is a very good idea to revise the concept of positive (negative) definite functions. These concepts are explained in our previous tutorial, which can be found here.
Formal Statment of the Lyapunov Theorem for the Local Stability of Equilibrium Point
Before we introduce examples, it is very important to state the Lyapunov local stability theorem for an equilibrium point of a dynamical system. This theorem is stated in a number of standard textbooks on nonlinear systems, such as:
- Nonlinear Systems, by Hassan K. Khalil (edition from 1992, page 101.)
- Applied Nonlinear Control, by Jean-Jacques E. Slotine and Weiping Li (edition from 1991, page 62.)
Lyapunov (local) Stability Theorem: Consider a dynamical system
(2) 
where 





- The function




- The time derivative of






Then,
In addition, if the first time derivative of 
In this brief tutorial, we give an intuitive explanation of Lyapunov’s stability theorem for one-dimensional system. This example is also explained in the accompanying video tutorial.
A positive definite function is shown below.

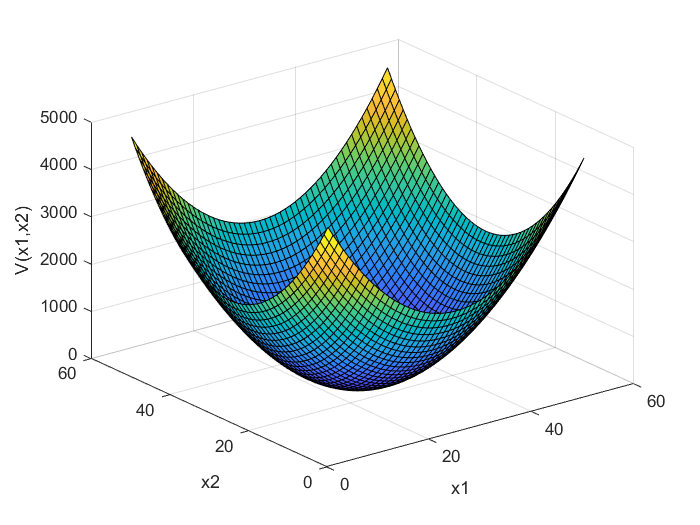
The function 

First Example of Stability Analysis
We consider the pendulum system shown in the figure below.

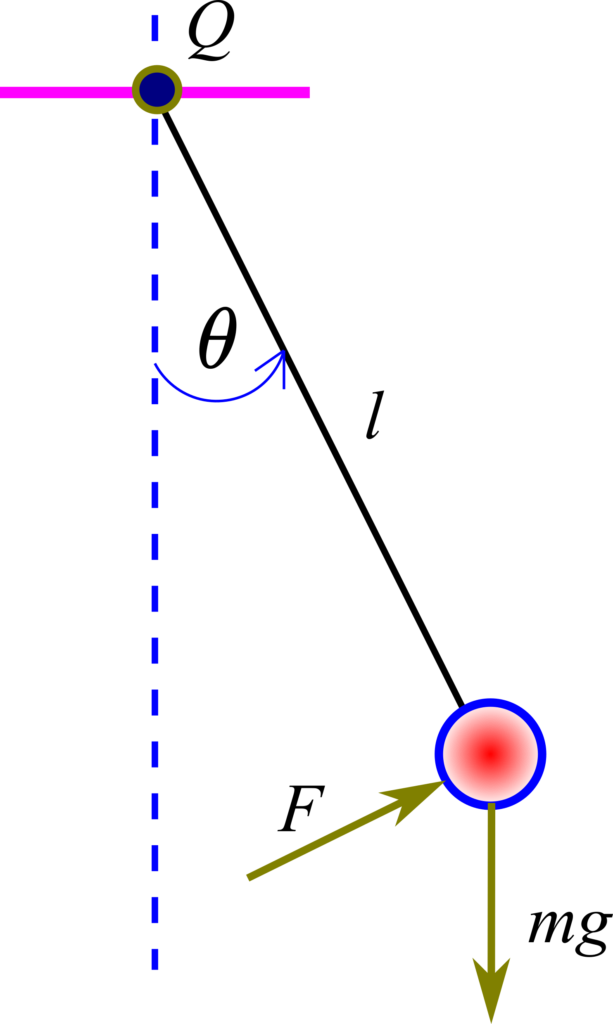
In this figure, 








(3) 

For stability analysis, we always assume that the control force
(4) 

Next, let us transform this equation into the state-space form by assigning the state variables
(5) 

The state-space model has the following form
(6) 

Next, let us simulate the state trajectories of such a system. In our previous tutorial, which can be found here, we explained how to simulate state trajectories in MATLAB. By entering the system dynamics (6) in the developed MATLAB codes, we obtain a phase portrait of the system. The phase portrait is given below. It is generated for the initial conditions 




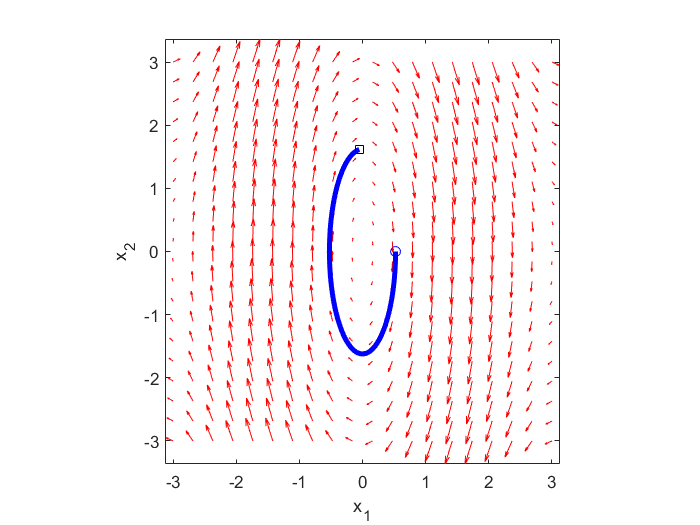
As can be observed from the figure above, the equilibrium point is stable, however, it is NOT asymptotically stable.
Let us now construct a Lyapunov function that will be used to formally prove that the equilibrium point is asymptotically stable. For that purpose, let us consider the figure shown below

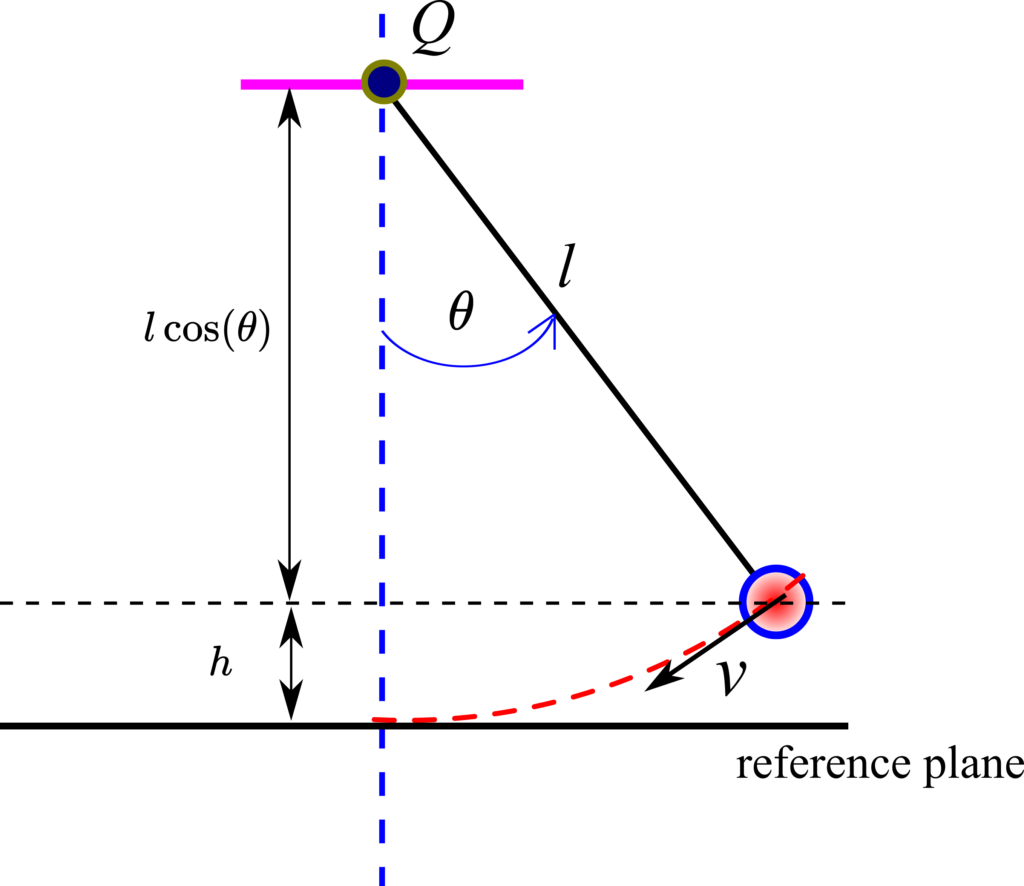
A good initial choice of the Lyapunov function is the total energy of the system. This is because if the system is asymptotically stable, then the energy of the system should decrease over time or if the system is stable, then the total energy is either constant or bounded (not increasing). Consequently, let us define the total energy of the system. The total energy is a sum of potential and kinetic energy:
(7) 

where 







(8) 

This function should be positive definite and 









(9) 

Next, let us compute the derivative of the function
(10) 

Next, we substitute 



(11) 

Consequently, according to the Lyapunov local stability theorem, the equilibrium point
The physical interpretation of this result is that the energy stays constant along the trajectories of the system! This is actually the law of energy conservation. That is, the potential energy transforms into the kinetic energy and vice-versa. However, the total energy remains constant!