In this tutorial, we derive the extended Kalman filter that is used for the state estimation of nonlinear systems. We furthermore develop a Python implementation of the Kalman filter and we test the extended Kalman filter by using an example of a nonlinear dynamical system. In this first part of the tutorial, we explain how to derive the extended Kalman filter.
The YouTube videos accompanying this tutorial are given below.
PART 1:
PART 2:

Before reading this tutorial, it is recommended to go over these tutorials on linear Kalman filtering:
- Introduction to Kalman Filter: Derivation of the Recursive Least Squares Method
- Introduction to Kalman Filter: Disciplined Python Implementation of Recursive Least Squares Method
- Time Propagation of State Vector Expectation and State Covariance Matrix of Linear Dynamical Systems – Intro to Kalman Filtering
- Kalman Filter Tutorial- Derivation of the Kalman Filter by Using the Recursive Least-Squares Method
- Disciplined Kalman Filter Implementation in Python by Using Object-Oriented Approach
General Information About Extended Kalman Filter
The extended Kalman filter is a generalization of the linear Kalman filter for nonlinear dynamical systems in the fairly general mathematical form given by the following state and output equations:
(1) 

where






























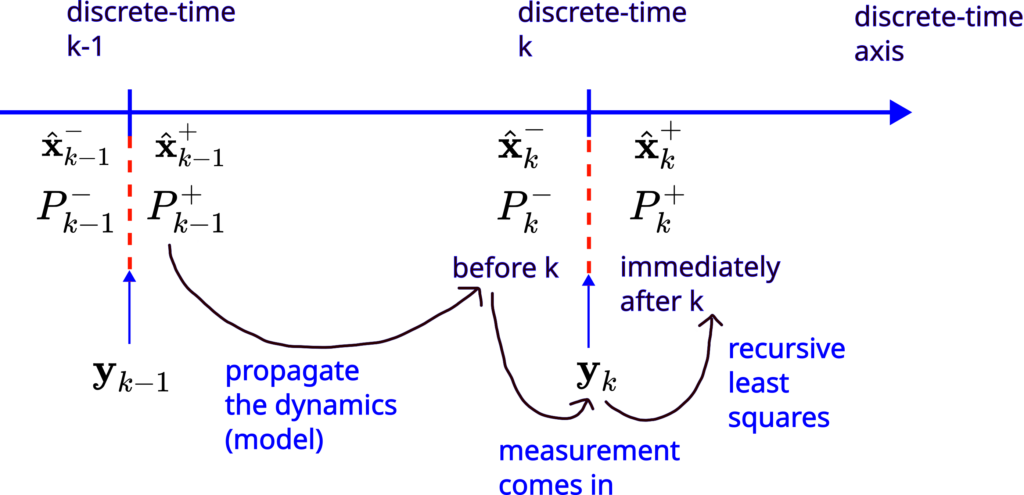
Before we start with the development of the extended Kalman filter, we need to explain the following notation. In Kalman filtering, we have two important state estimates: the a priori state estimate and the a posteriori state estimate. Apart from this post and Kalman filtering, a priori and a posteriori are Latin phrases whose meaning is explained here.
The a priori state estimate of the state vector 





(2) 

where “the hat notation” denotes an estimate, and where the minus superscript denotes the a priori state estimate. The minus superscript originates from the fact that this estimate is obtained before we process the measurement
The a posteriori estimate of the state 

(3) 

where the plus superscript in the state estimate notation denotes the fact that the a posteriori estimate is obtained by processing the measurement
Another concept that is important for understanding and implementing the extended Kalman filter is the concept of the covariance matrices of the estimation error. The a priori covariance matrix of the state estimation error is defined by
(4) ![\begin{align*}P_{k}^{-}=E[(\mathbf{x}_{k}-\hat{\mathbf{x}}_{k}^{-})(\mathbf{x}_{k}-\hat{\mathbf{x}}_{k}^{-})^{T}]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-84d842b30b849514b5a685c05500bfb5_l3.png "Rendered by QuickLaTeX.com")

On the other hand, the a posteriori covariance matrix of the state estimation error is defined by
(5) ![\begin{align*}P_{k}^{+}=E[(\mathbf{x}_{k}-\hat{\mathbf{x}}_{k}^{+})(\mathbf{x}_{k}-\hat{\mathbf{x}}_{k}^{+})^{T}]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-bcf3776a64f412d3f59bc1861b827a6c_l3.png "Rendered by QuickLaTeX.com")
Derivation of the Extended Kalman Filter
We start from the nonlinear state equation that is rewritten over here for clarity
(6) 

Let us assume that at the discrete-time instant 





(7) 

where
- The matrix




(8) 

where 

(9) 

where
(10) 

That is, the 







- The vector


(11) 

The next step is to linearize the output equation. As it will be explained later, at the time instant 

(12) 

The linearization procedure produces:
(13) 

where
- The matrix

(14) 

This matrix is the Jacobian matrix of the function 

(15) 

where
(16) 

That is, the
The vector 

(17) 

It is important to emphasize that this vector is completely known.
Let us now summarize the linearized state and output equations:
(18) 

The third main idea of the extended Kalman filter is to apply the linear Kalman filter to these equations. The only divergence from the linear Kalman filter is to use the nonlinear state equation to propagate the a posteriori estimates in time. We derived the linear Kalman filter in our previous tutorial which can be found here. Consequently, we will use the derived equations and apply them to our case.
EXTENDED KALMAN FILTER:
At the initial discrete-time step 







STEP 1 (after the time step 

(19) 
Then, we compute the a priori estimate 

(20) 

At the end of this step, compute the Jacobian matrix of the output equation
(21) 
STEP 2 (immediately after the time step
(22) 

Then, compute the a posteriori state estimate:
(23) 

where the third form of the above-stated equation is the most appropriate for computations. Finally, compute the a posteriori covariance matrix by using either this equation
(24) 
or
(25) 

Due to numerical stability, the equation (25) is a more preferable option to be used for covariance matrix time propagation.
The above-summarized two steps are graphically illustrated in the figure below.