In this estimation, control theory, machine learning, signal processing, and data science tutorial, we provide a clear and concise explanation of a particle filter algorithm. We focus on the problem of using the particle filter algorithm for state estimation of dynamical systems. Besides providing a detailed explanation of particle filters, we also explain how to implement the particle filter algorithm from scratch in Python. Due to the objective complexity of the particle filters, we split the tutorial into three parts:
- Part 1. You are currently reading Part I. In this tutorial part, we define the particle filter estimation problem. We explain what is the main goal of particle filters and what particle filers are actually computing or better to say, estimating. We also clearly explain the concepts of state transition probability (state transition probability density function), measurement probability (measurement probability density function), posterior distribution (posterior probability density function), etc.
- Part 2: In the second tutorial part whose link is given here, we present the particle filter algorithm.
- Part 3: In the third tutorial part whose link is given here, we explain how to implement the particle filter in Python from scratch.
These tutorials are specially designed for students who are not experts in statistics and who are not experts in control theory. We thoroughly explain all the used statistics concepts. Nowadays, there is a trend not to thoroughly study theoretical concepts and quickly jump to Python scripts implementing algorithms, without first properly understanding the theoretical background of algorithms. If you follow such an approach, you will never be able to understand particle filters, and you will not even be able to understand the Python implementation of particle filters. To properly understand particle filters, you need to first properly understand important concepts from dynamical system theory, probability theory, and statistics. These concepts are thoroughly explained in this tutorial. Consequently, reserve some time and stay focused while reading this tutorial. Do not immediately jump to the second or third parts without properly understanding the material presented in this tutorial.
That is, THIS TUTORIAL IS NOT FOR STUDENTS WHO EASILY GIVE UP. PROPER UNDERSTANDING OF PARTICLE FILTERS REQUIRES EFFORT FROM THE STUDENT’S SIDE.
In this tutorial:
- We explain what are state-space models.
- We explain what are the process disturbance and measurement noise of state-space models.
- We explain what is a transition state probability of a state-space model.
- We explain what is a measurement probability of a state-space model.
- We explain what is a Markov process.
- We explain the classical state estimation problems, such as recursive and batch state estimation problems.
- We explain the main difference between particle filter estimation problems and classical estimation problems.
- We explain what is a posterior distribution in particle filter estimation problems.
- We explain what are particles in particle filter algorithms.
- We explain what are weights and state-space samples in particle filter algorithms.
- We provide an intuitive explanation of the approximation of posterior distribution by using discrete probability involving particles.
- We define the problem of estimating the posterior distribution by using particle filters.
The YouTube tutorial accompanying this tutorial is given below.

By the end of this tutorial, you will be able to understand these two important graphs that illustrate the particle filter problem formulation.


Also, by going through all 3 tutorial parts, you will be able to simulate a particle filter shown in the video below.

State Estimation By Using Particle Filters – Problem Formulation
First, we explain the concept of a state-space model of a dynamical system. Then, we introduce statistical distributions that are related to the state-space model. Finally, we define the state estimation problem for particle filters.
State-Space Models
First, we need to define what is a model of a dynamical system. In a fairly general form, models of dynamical systems are represented by the state and output equations:
(1) 

where 

















It is always important to keep in mind the following facts when dealing with state-space models of dynamical systems given by (1).
- The state of the system


- The vector

- The vector

- The vector





For clarity and not to blur the main ideas of particle filters with too many details of complex nonlinear functions, in this tutorial and other parts of the tutorial series, we assume that the model (1) is linear and that it has the following form
(2) 

where 




Statistics and State Space Models
Here, we explain the statistics of random vectors in the state-space model (2). The proper understanding of the statistics of these vectors is important for the proper understanding and implementation of particle filters. Here, for clarity, we repeat the state-space model description:
(3) 
Here, for simplicity and presentation clarity, we assume that
- The process disturbance vector


(4)

where this notation means that the vector




- The measurement noise vector

(5)









We introduced these assumptions to simplify the explanation of particle filters. However, particle filters can be used when random vectors have non-Gaussian probability distributions.
In our previous tutorial given here, we explained how to simulate the stochastic state-space model (3) in Python. It is a good idea to go over that tutorial in order to get yourself familiar with the simulation of random state space models. The simulated state-space trajectory is given below.

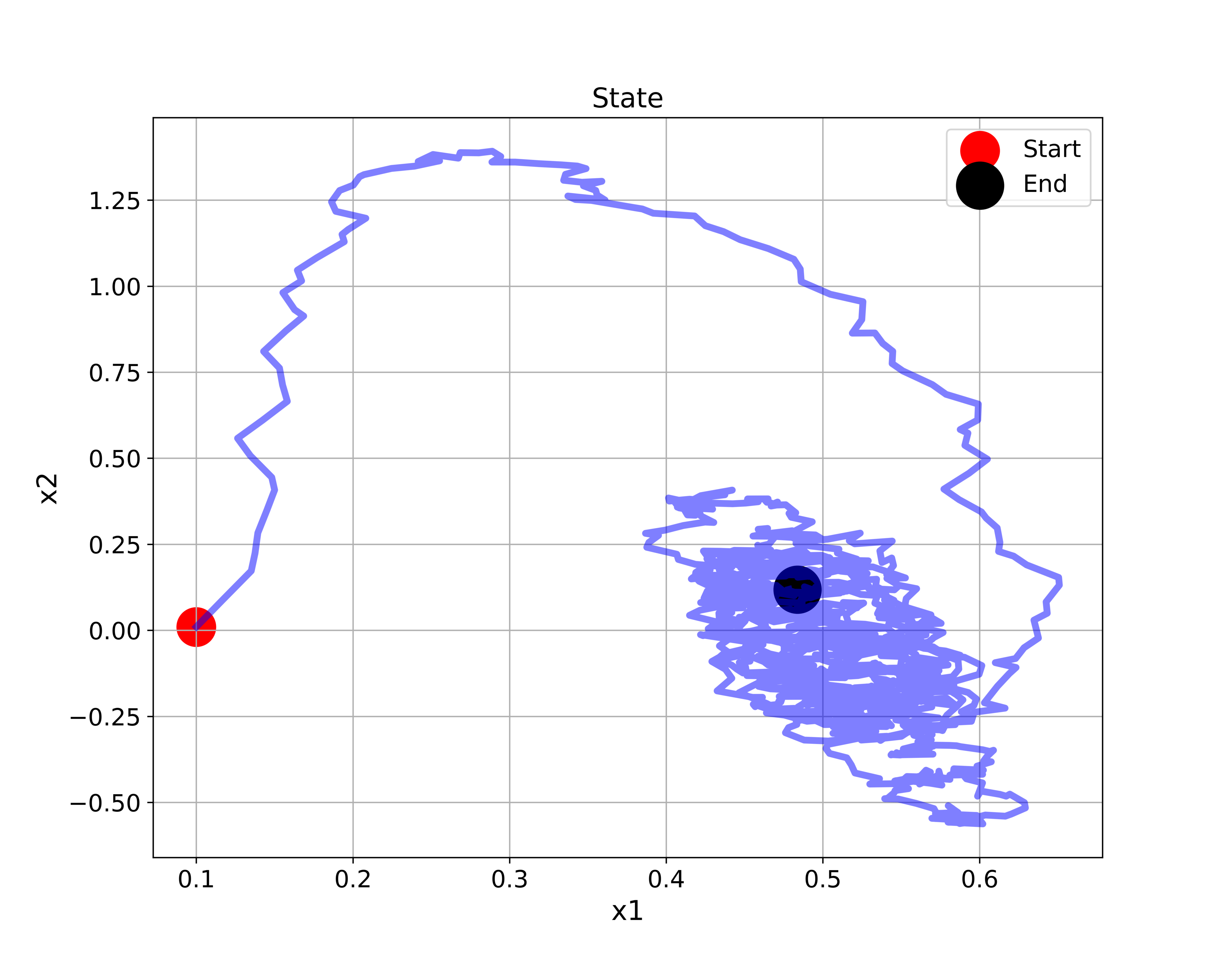
In Fig. 1 above, at every discrete-time step, we generate a random sample of the process disturbance vector
Here is very important to properly understand the following. In (3), since the vector 

(6) 

This is a probability density function of a conditional probability. That is, this is a probability density function of a probability of
Now, the main question is: What is the mathematical form of the state transition probability? Since the vector
(7) 

The covariance matrix is equal to the covariance of 

(8) 

where 

On the other hand, since the measurement vector
(9) 

This is a probability density function of the conditional probability that is derived under the assumption that the value of 

Consequently, we conclude
(10) 

where 

Here, we need to explain an additional concept that you will need to understand in order to understand the derivation of the particle filter that we will present in the next tutorial. Namely, often in estimation and statistics literature, you will encounter the term “Markov process” or a “Markov chain”. Loosely speaking, a stochastic process is Markov if the state probability at the current time step depends only on the state (and known constants) from the previous time step. This means that the state sequence:
(11) 

is generated such that the probability of moving from the previous state


(12) 

However, since an output equation participates in a state-space model description, for a state-space model to be a Markov state-space model, we also need an additional requirement. This requirement is that the output probability at the current time step depends only on the state (and known constants) at the current time step. This means that the output probability density function must satisfy
(13) 

Obviously, the linear state-space model (3) is a Markov state-space model.
State Estimation Using Particle Filters – Problem Formulation
Here again, for presentation clarity, we repeat the state-space model
(14) 
The standard notation for the state estimate at the time step 

To be able to understand the state estimation problem for particle filters, one first needs to understand the classical state estimation problem. The classical state estimation problem is to estimate the state at the current time step
- State-space model of the system (14).
- Past state estimates up to and NOT including the time step





- Past observed outputs up to AND including the time step



- Past control inputs up to and NOT including the time step








That is, the classical state estimation problem is to compute the state estimate
Generally speaking, the classical state estimation problem can be solved by using three approaches. The first approach is to use the batch mathematical formulation, where the state is directly estimated by solving an optimization problem involving a sequence of past input and output data. The most basic estimator that uses this idea is an open-loop least-squares observer which we explained in our previous tutorial:
The second approach is to recursively (sequentially or iteratively) estimate the state at the time step
- Correct Explanation of State Observers for State Estimation of State-Space Models with Python Simulations
- Design and Test Observers of Dynamical Systems in MATLAB
- Kalman Filter Tutorial- Derivation of the Kalman Filter by Using the Recursive Least-Squares Method
- Disciplined Kalman Filter Implementation in Python by Using Object-Oriented Approach
The third approach is to combine the first and second approaches. The third approach is called moving horizon estimation. We will cover the moving horizon estimation approach in our future tutorials.
Most of the above-mentioned estimation approaches produce a single estimate of the state vector. That is, they aim at directly computing
On the other hand, particle filters use a completely different estimation paradigm.
Instead of mainly being focused on computing a single state estimate, particle filters aim at estimating a probability distribution or a probability density function of the state 



By using the Bayesian estimation terminology, this distribution is called the posterior distribution or posterior probability. The probability density function of the posterior probability is denoted by
(15) 

where 



(16) 

In robotics literature, the posterior probability is also called the belief distribution. Also, some researchers call the posterior density as the filtering density. The vertical bar in the notation for the posterior probability density function (15) means that this posterior is computed by using the information available in the output
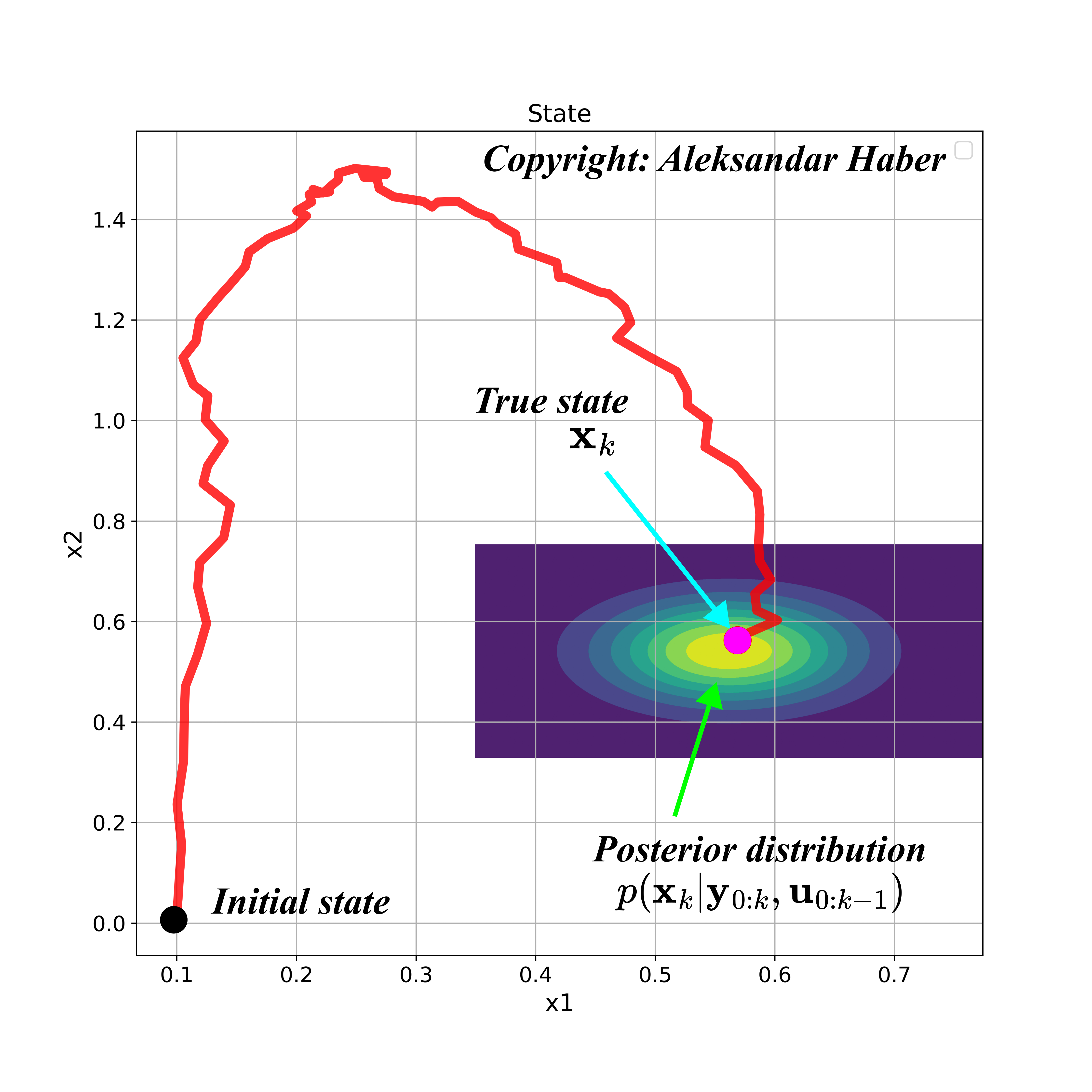
The figure below shows a simulated state-space trajectory of a second-order system, and a possible posterior distribution at the time step
In Fig. 2 above, the posterior distribution is represented by the contour plot. The colors represent the values of the probability density function. The brighter the color is, the higher the value of the probability density function of the posterior distribution is.
The posterior probability encapsulates the complete statistical information about the posterior state. The knowledge of the posterior probability enables us to accurately compute important statistical quantities related to our estimate, such as the mean (which can serve as a form of estimate), covariance matrix, higher-order moments, mode, confidence intervals, etc. We can also formulate an estimate as some other statistical measure that is computed on the basis of the posterior probability density function. That is, the complete solution to the state estimation problem is the posterior probability or posterior probability density function.
Motivated by this, a particle filter estimation algorithm aims at reconstructing or estimating the posterior probability density function or posterior probability of state.
That is, in sharp contrast to the classical estimation algorithms that are mainly focused on computing a single state estimate (and possibly moments of distributions related to the estimation problem, however, this is often only feasible for normal distributions), the particle filters aim at reconstructing or estimating the complete posterior probability density of the state. This is very important to understand!
The output of the particle filter is a discrete approximation of the posterior probability density function. The output is a set of particles approximating the distribution. Let us now explain what are the particles in particle filters.
Generally speaking, a particle is defined by the state 





(17) 

The weights are normalized, such that 

(18) 

where 

In probability theory, the Dirac delta function is used to represent a distribution of discrete variables by using the probability density function of the continuous variables. That is, the Dirac delta function is used to extend the definition of the probability density function for discrete random variables. This is very important to understand. For example, let us assume that we have a discrete set of values (points) that some random variable 










(19) 

By using this probability theory fact, we can interpret the weights 

For example, let us consider a simple case. Let us assume that the samples are scalar (states are scalars), and let us assume that we only have 












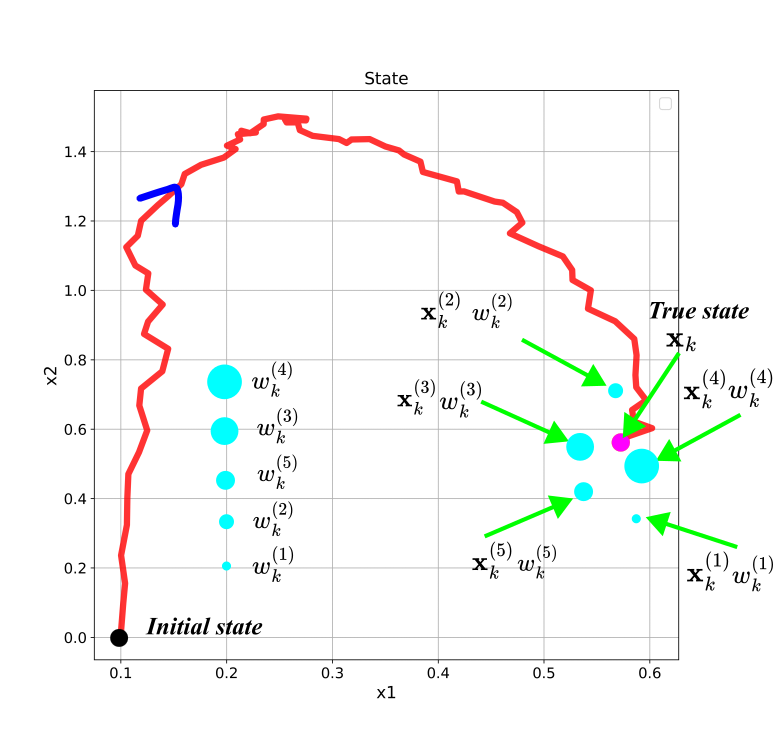
Next, let us consider another example, where the state is two-dimensional. The figure shown below shows the possible particles for the 2D state-space trajectory (see also the prior distribution shown in Fig. 2.). This trajectory is generated in Python by simulating the dynamics of a 2D dynamical system. The tutorial is given here.
In the figure above, the weight value is represented by the radius of the light blue circles. The larger the value of the weight is, the larger the radius of the circle is. The particle 

Generally, speaking the knowledge of the particles
(20) 
enable us to approximate any statistical moment (mean, covariance, and higher-order moments) or expectation of a nonlinear function of state by using this equation
(21) ![\begin{align*}E[\mathbf{d}(\mathbf{x}_{k})|\mathbf{y}_{0:k},\mathbf{u}_{0:k-1}]=\sum_{i=1}^{N}w^{(i)}_{k}\mathbf{d}(\mathbf{x}_{k}^{(i)})\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-a7d1ddec34c9eaf1c4d3431ed3a2033b_l3.png "Rendered by QuickLaTeX.com")

where ![E[\cdot]](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-3941b329206b0baa01fad23b819cc5f7_l3.png "Rendered by QuickLaTeX.com")





TO CONCLUDE: BY COMPUTING THE PARTICLES 
Now we are ready to formulate the estimation problem for particle filters. We will formulate two problems.
ESTIMATION PROBLEM 1- GENERAL ESTIMATION PROBLEM FOR THE POSTERIOR DISTRIBUTION: By using the information about
- State-space model of the system (14).
- Transition probability

- Measurement probability

- Observed outputs


- Initial guess of the particles
(22)


At every time step (23) 
that approximate the posterior distribution of the state

The above estimation problem is defined in a batch estimation framework. The particle filter algorithm solves this problem recursively. Consequently, let us define the recursive estimation problem.
ESTIMATION PROBLEM 2- RECURSIVE ESTIMATION PROBLEM FOR THE POSTERIOR DISTRIBUTION: By using the information about
- State-space model of the system (14).
- Transition probability
- Measurement probability
- Observed outputs
- The set of particles computed at the time step
(25)


At the time step

That recursively approximates the posterior distribution

You should notice the main difference between these two problem formulations. The first problem formulation uses all the information up to the time instant