In this robotics and control engineering tutorial, we explain how to develop a simple discrete-time model of a mobile robot that can be used for the development of algorithms for localization, Simultaneous Localization And Mapping (SLAM), and dead reckoning.
We develop a discrete-time kinematics model and we explain several important aspects of this model. This model is used in our other tutorials for the development of robotics algorithms. This is arguably the simplest possible model of a mobile robot. For simplicity and clarity of this tutorial, we focus on a differential drive mobile robot introduced in our previous tutorial given here. Consequently, we strongly suggest to the reader of this tutorial to first thoroughly read and understand the material presented in our previous tutorial.
Although simple, the model developed in this tutorial can still be used in practical applications and the modeling ideas presented in this tutorial can be used as an inspiration to develop models of robots with various configurations.
We use two approaches to develop the discrete-time kinematics model. Both approaches result in the same discrete-time model. The first approach is based on the direct discretization of the continuous-time model of the robot kinematics. The second approach uses simple trigonometry and physical intuition to develop the model. The YouTube tutorial accompanying this tutorial is given below.

Continuous-Time Model of Mobile Robot
The figure below shows a graphical representation of a differential drive robot introduced in our previous tutorial given here.

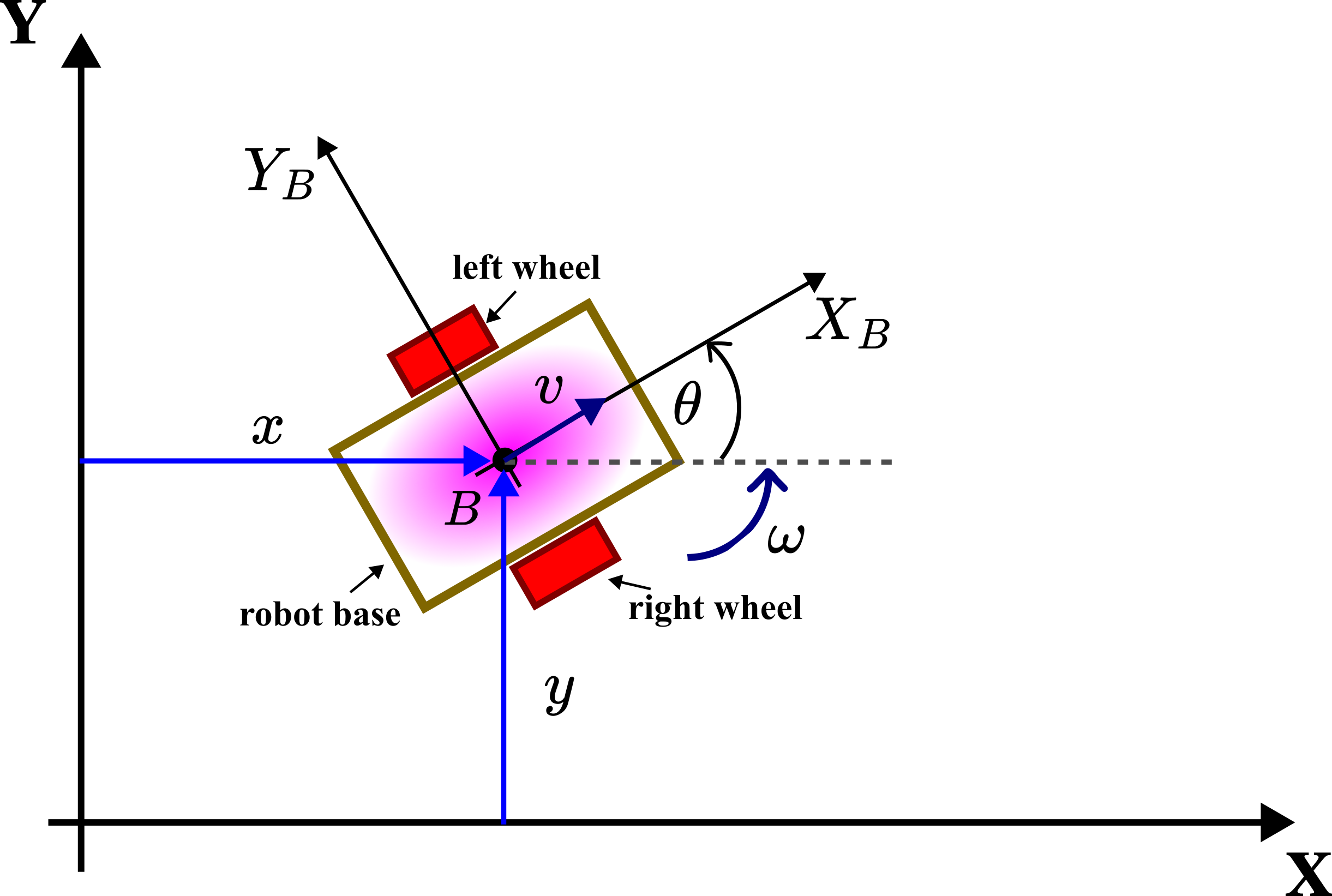
The robot consists of the robot base with two active (actuated) wheels and a third passive caster wheel. The third passive caster wheel provides the stability of the robotic platform (passive means that is not actively actuated, however, the wheel can still move around two perpendicular axes). This third wheel is not shown on the graph for clarity. We introduce the following quantities:
- Inertial coordinate system


- Body coordinate system



- The coordinates


- The angle











Next, we need to define what is a robot pose. The (robot) pose is the vector 
(1) 

The (robot) pose completely defines the position (location) and orientation of the robot with respect to the fixed inertial frame
The precise knowledge of the robot pose is important for a number of reasons. First of all, it determines the precise location and orientation of the robot in space. Secondly, the robot pose is used for feedback control. Finally, robot pose information is used in other robotic algorithms, such as path planning, obstacle avoidance, and SLAM algorithms.
In our previous tutorial given here, we derived the continuous-time kinematics model describing the robot motion
(2) 

This model relates the instantaneous velocity
Derivation of the Robot Model by Using Discretization
Here, we obtain the robot model by using the forward Euler discretization. By using the forward Euler method, we discretize the time derivatives of 
(3) 

where 













(4) 

where 





From (4), we obtain the discretized kinematics model of the robot
(5) 

Next, we need to observe the following
- The product

(6)

- Since

(7)





Finally, by using (6) and (7), the final discretized model of the robot kinematics takes the following form
(8) 

Derivation of the Robot Model by Using Trigonometry and Physical Intuition
First, let us analyze the discrete-time model (8) obtained by using the forward Euler method. If we ignore the last equation in (8), the resulting two equations
(9) 

describe the translation of the robot body along the direction of the instantaneous velocity vector, where the orientation angle
(10) 

then, this equation describes the rotation for the angle of 

Let us not use this principle to rederive the kinematics model (8) by using a more intuitive approach that does not explicitly rely upon the model discretization.
We formally decompose the motion of the robot from the starting point (at the discrete-time
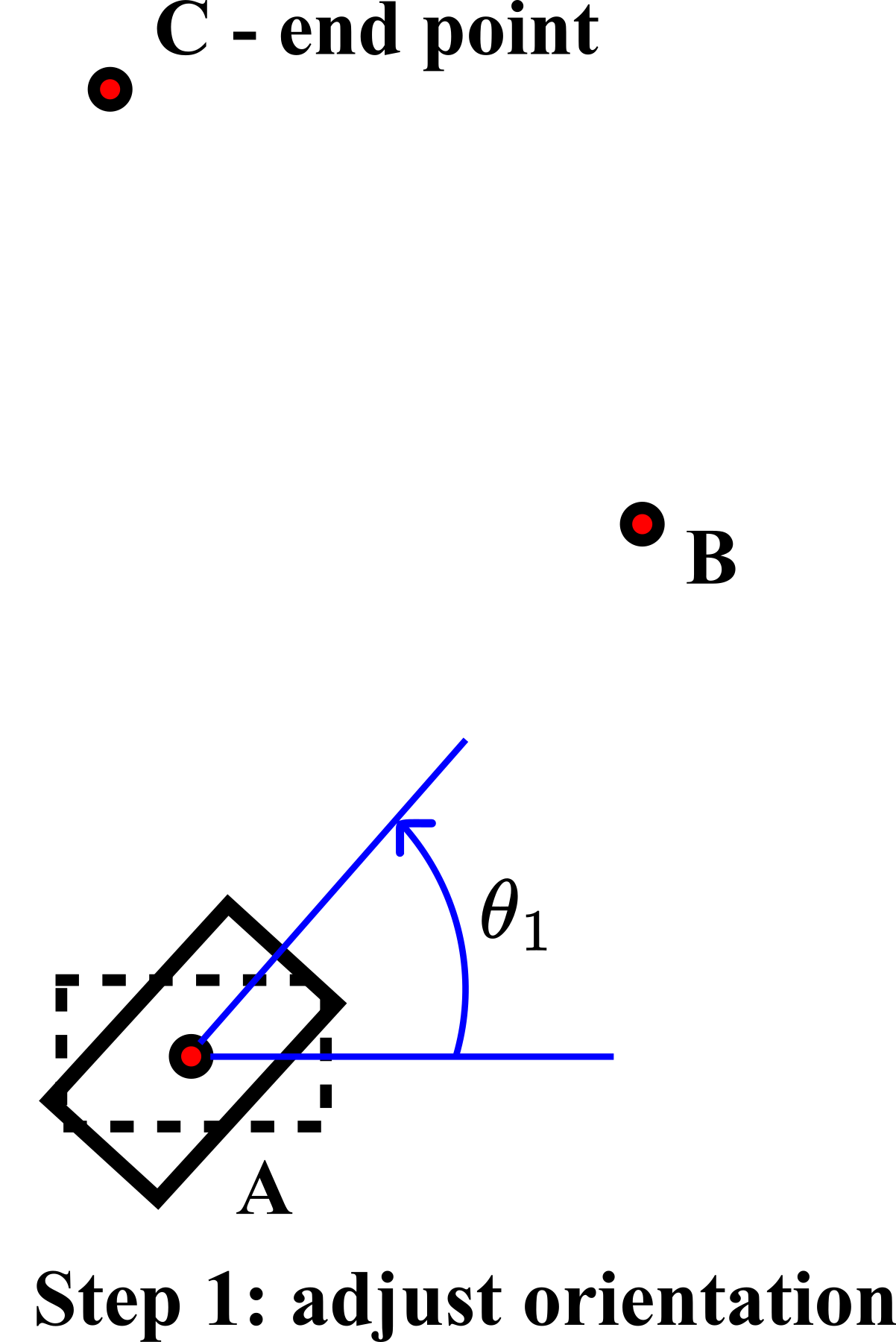
- From the starting point

- At the point



This is just a formal mathematical decomposition of the motion, since in practice, the actual motion between the two points might not look like this. This is an approximation of the motion that enables us to mathematically analyze the geometry and kinematics of motion. However, if the time interval
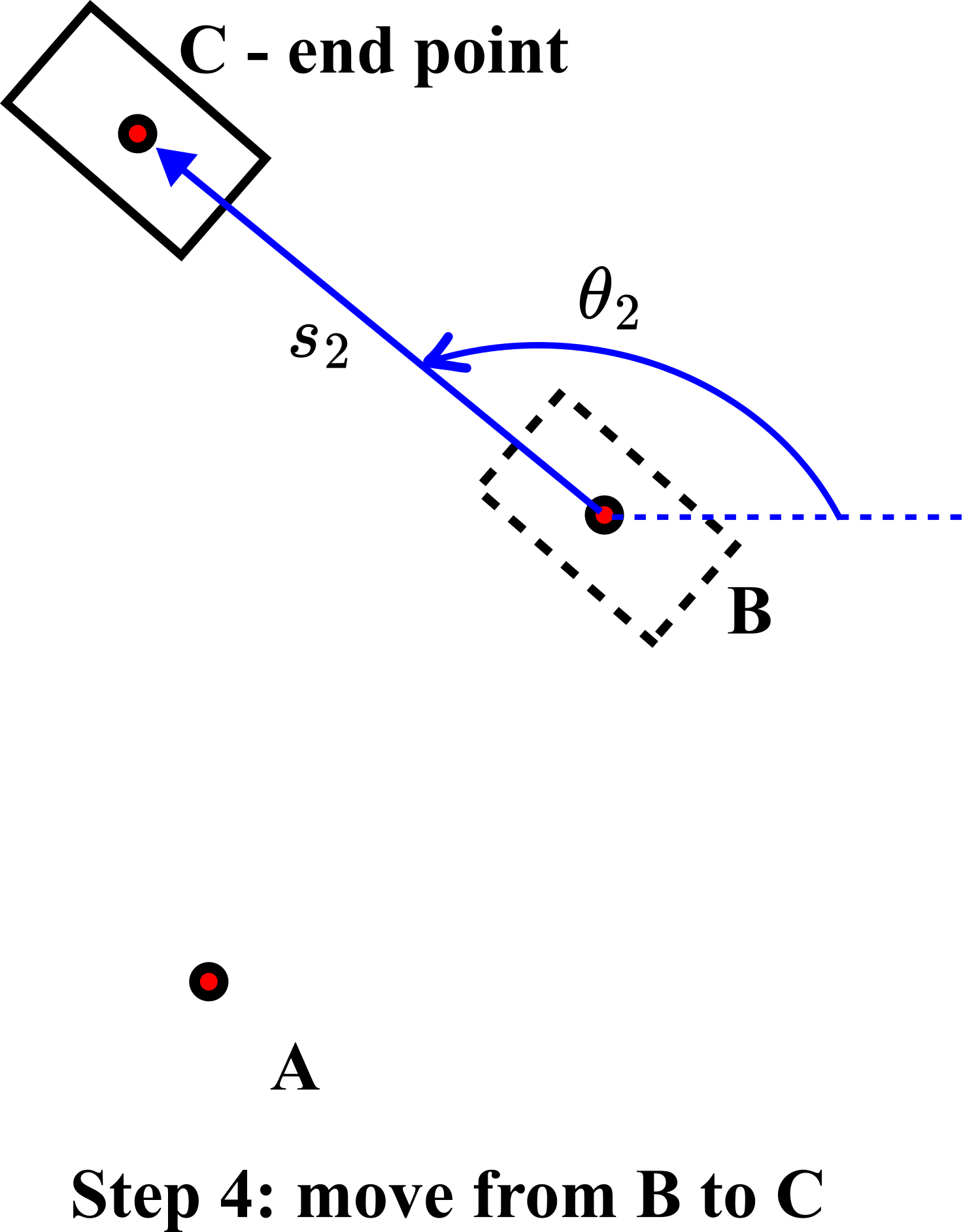
To repeat, from the mathematical point of view, the motion is decomposed into a series of straight-line motions and orientation changes. Let us illustrate this with the example shown in the figure below.

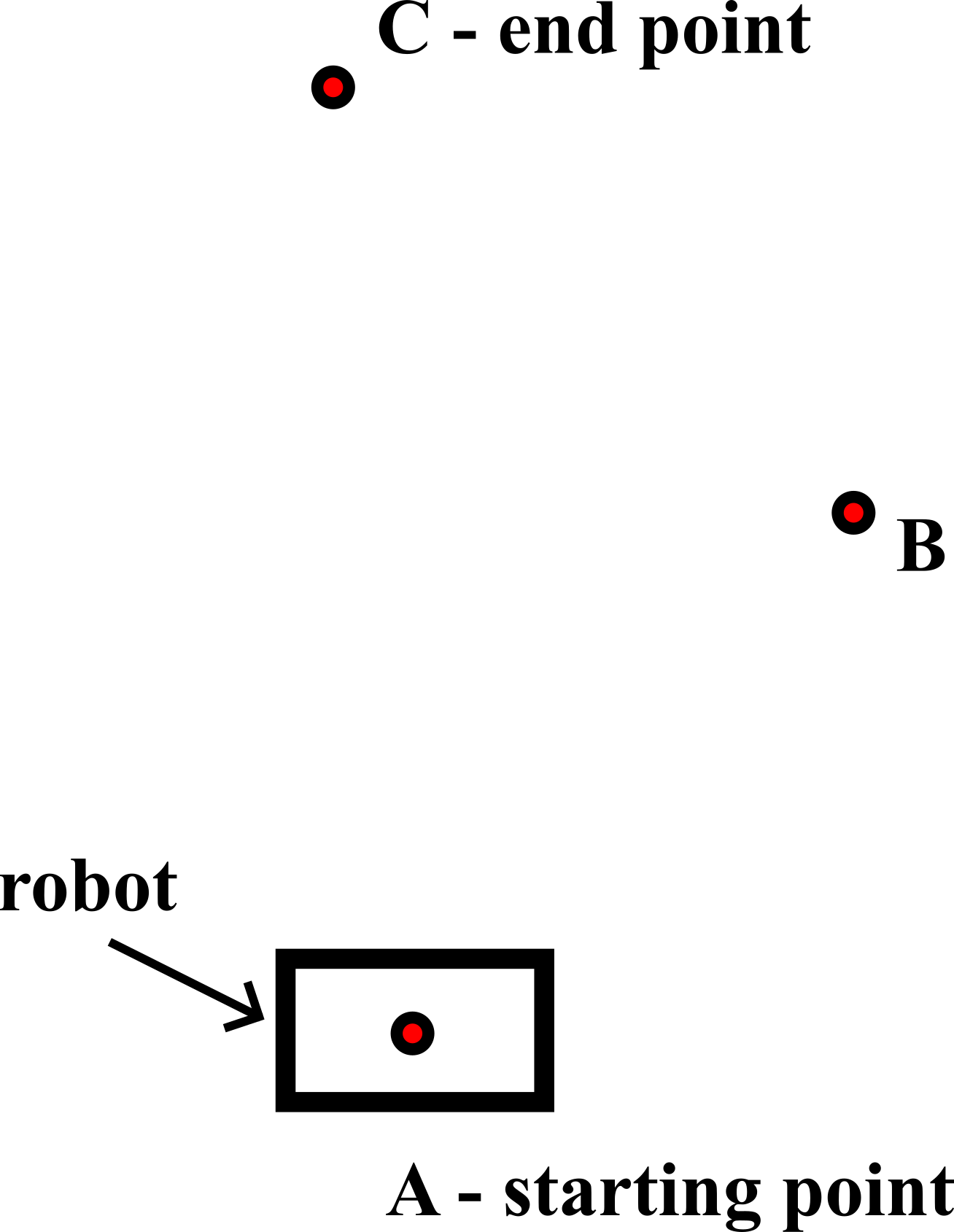
The goal is to move from the point 



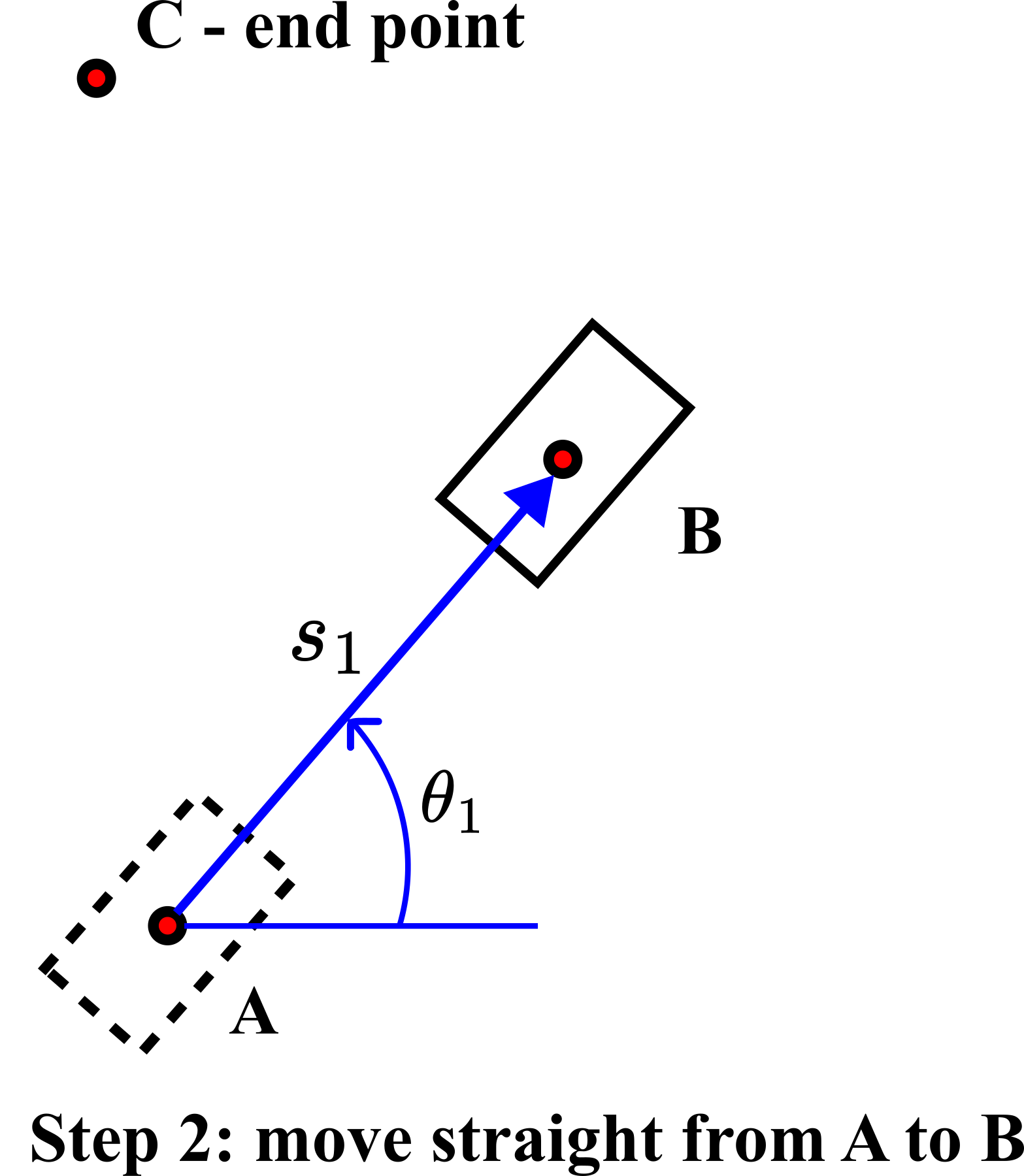
In step 2, we move from the point A to the point 


In step 3, we adjust the orientation of the robot for the angle 

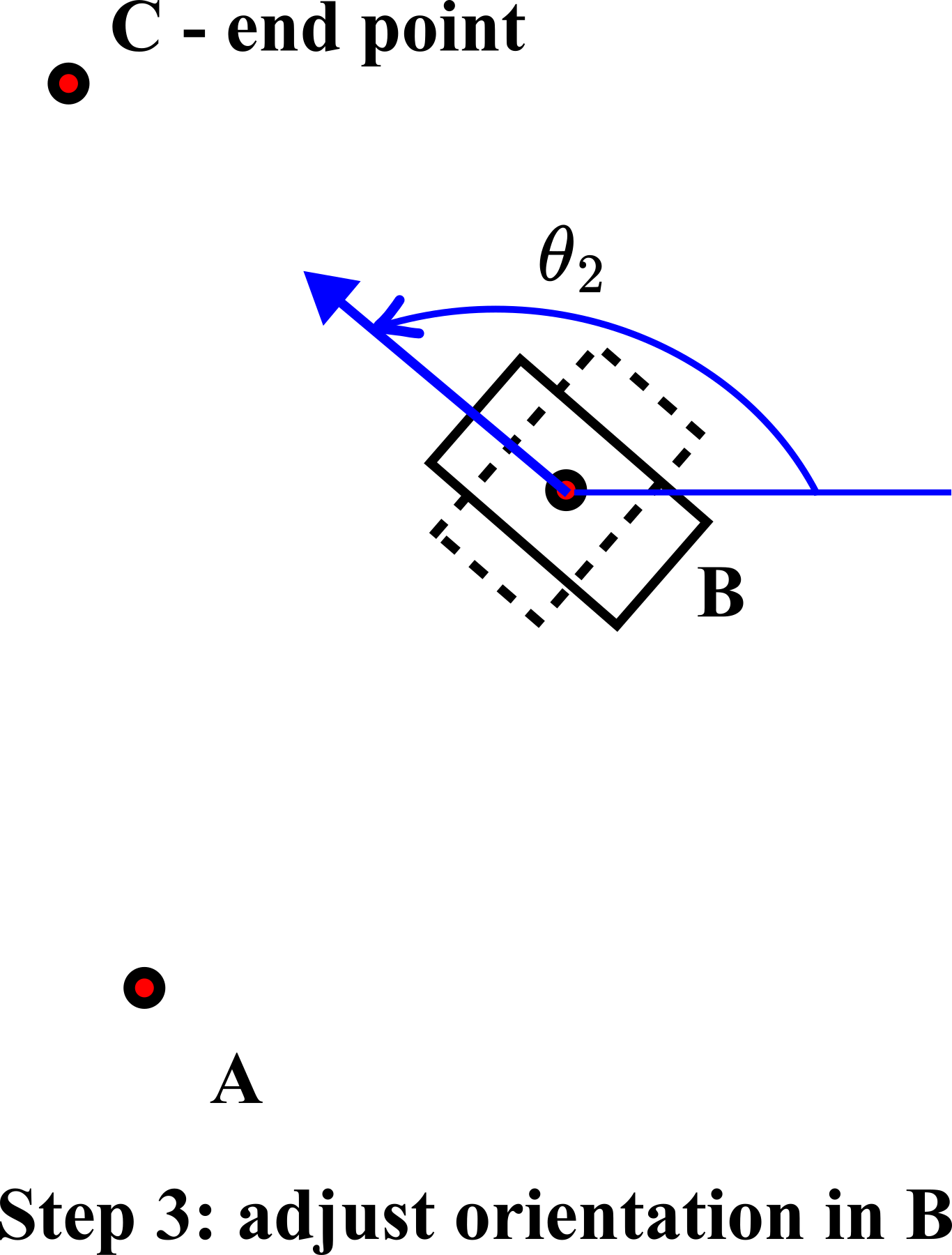
In step 4, we move along the straight line from the point 


Next, we develop the kinematics model of the robot that mathematically describes this motion. Consider the figure shown below.

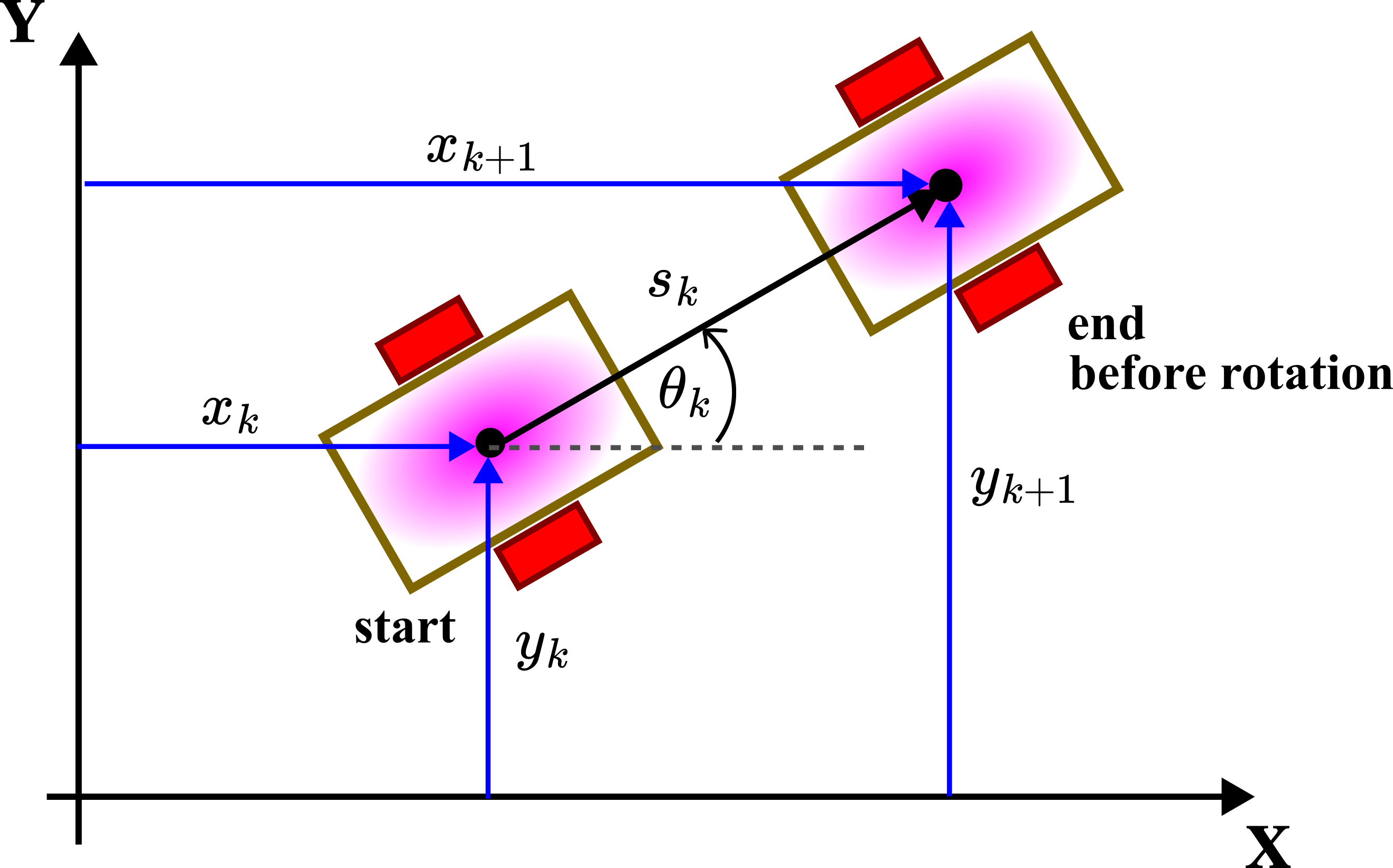
Here, we remind the reader that
(11) 

where 



(12) 

From the discrete-time instant 
(13) 
These equations describe the location of the robot at the time instant 


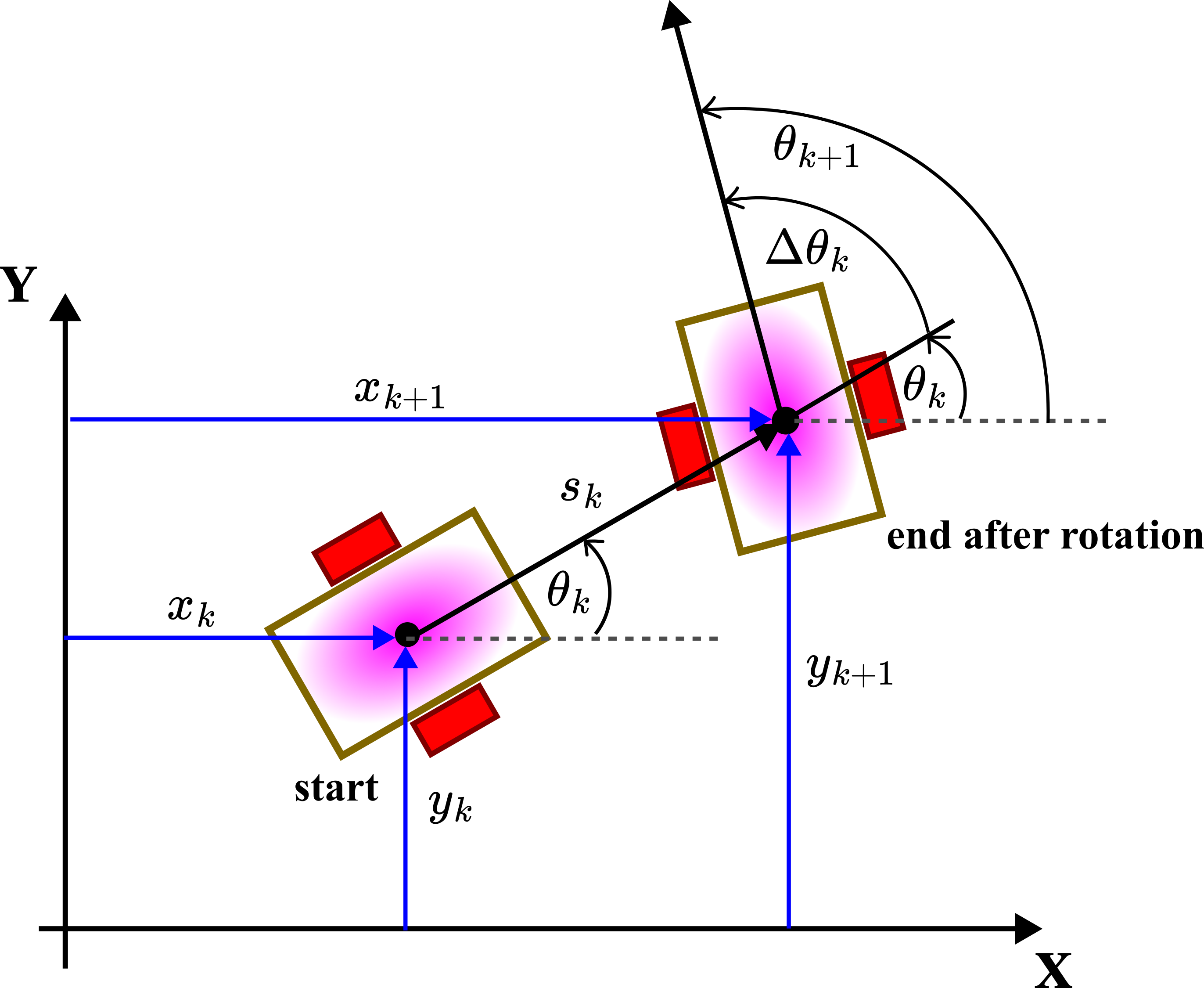
In the endpoint, we perform the rotation for the angle
(14) 
By combining (13) and (14), we obtain the final kinematics model of the mobile robot
(15) 
That is precisely the kinematics model (8) obtained by using discretization.
Important Remarks About the Derived Model
Here, for clarity, we repeat the derived model
(16) 
Usually, the traveled distance
(17) 

where 



(18) 
