In this robotics tutorial, we explain the kinematics, equations, and geometry of motion of a differential wheeled robot. The differential wheeled robot is also known as the differential drive robot. We will derive the equations describing the kinematics of the robot, and in the second part of this tutorial, we will explain how to simulate the motion of the differential wheeled robot in Python. The YouTube tutorial accompanying this post is given below.

Basic Description of the Differential Drive Robot and Motion Modes
The videos given below show a real-life differential wheeled robot and its motion.


The photograph of the differential drive robot is given below.

The robot consists of two wheels that are driven by two DC motors, and the caster wheel. The caster wheel is a passive wheel that provides support and two rotations. These two rotations enable the robot to move in any direction.
The figure given below shows a top view of the differential drive robot after a few geometrical simplifications that do not affect the modeling generality.

The robot consists of the robot base and two wheels. The points 








Here, it is very important to emphasize the following:
- We can completely control the robot’s motion by controlling the right and left wheel angular velocities or the right and left wheel rotational angles. The velocities
Let us illustrate this further with several control scenarios.
The figure below illustrates how we can achieve the straight motion of the robot.

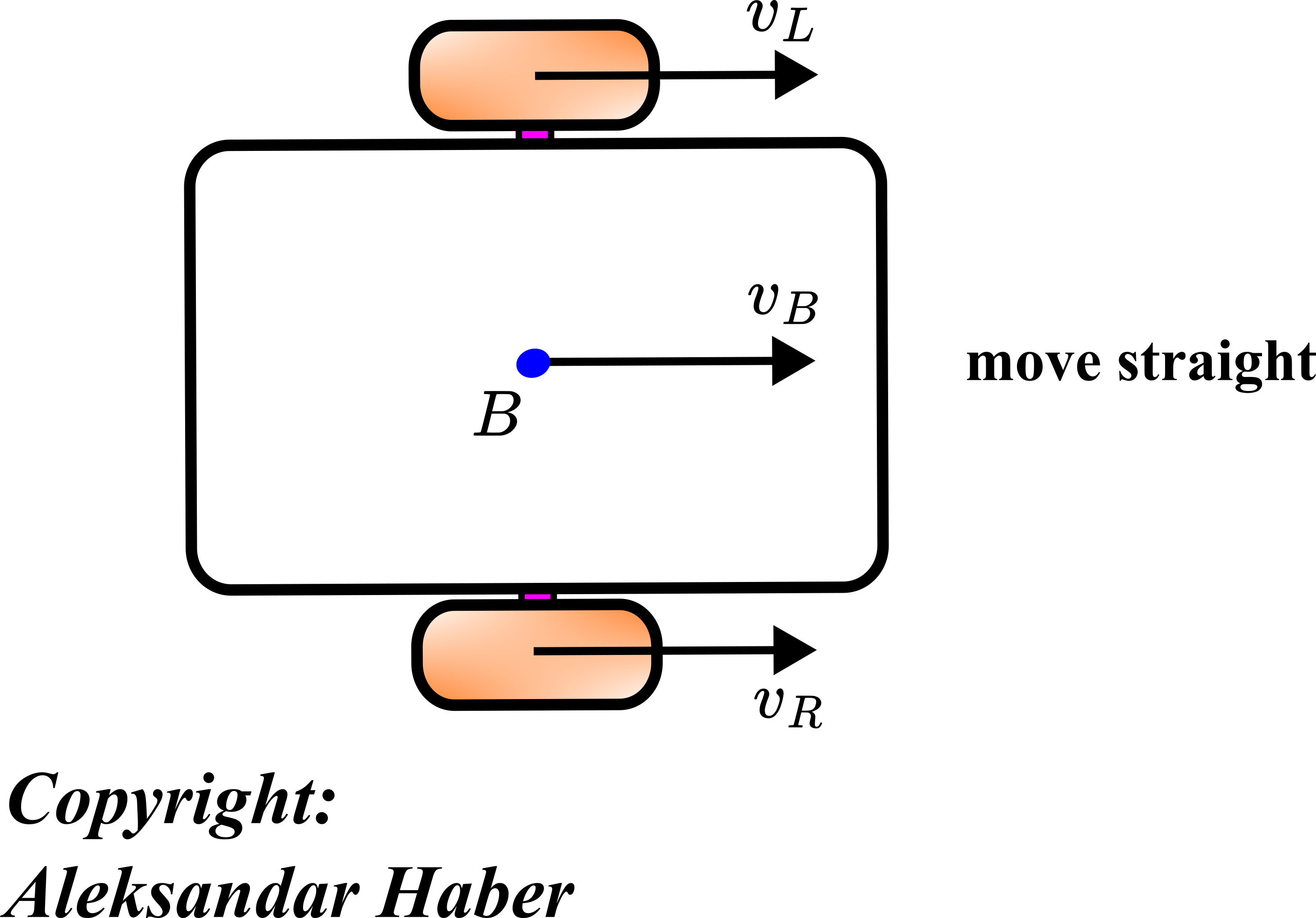
In the scenario shown in the figure above, the robot is moving straight. This is because the intensities of the velocities
The figure below shows another important scenario.

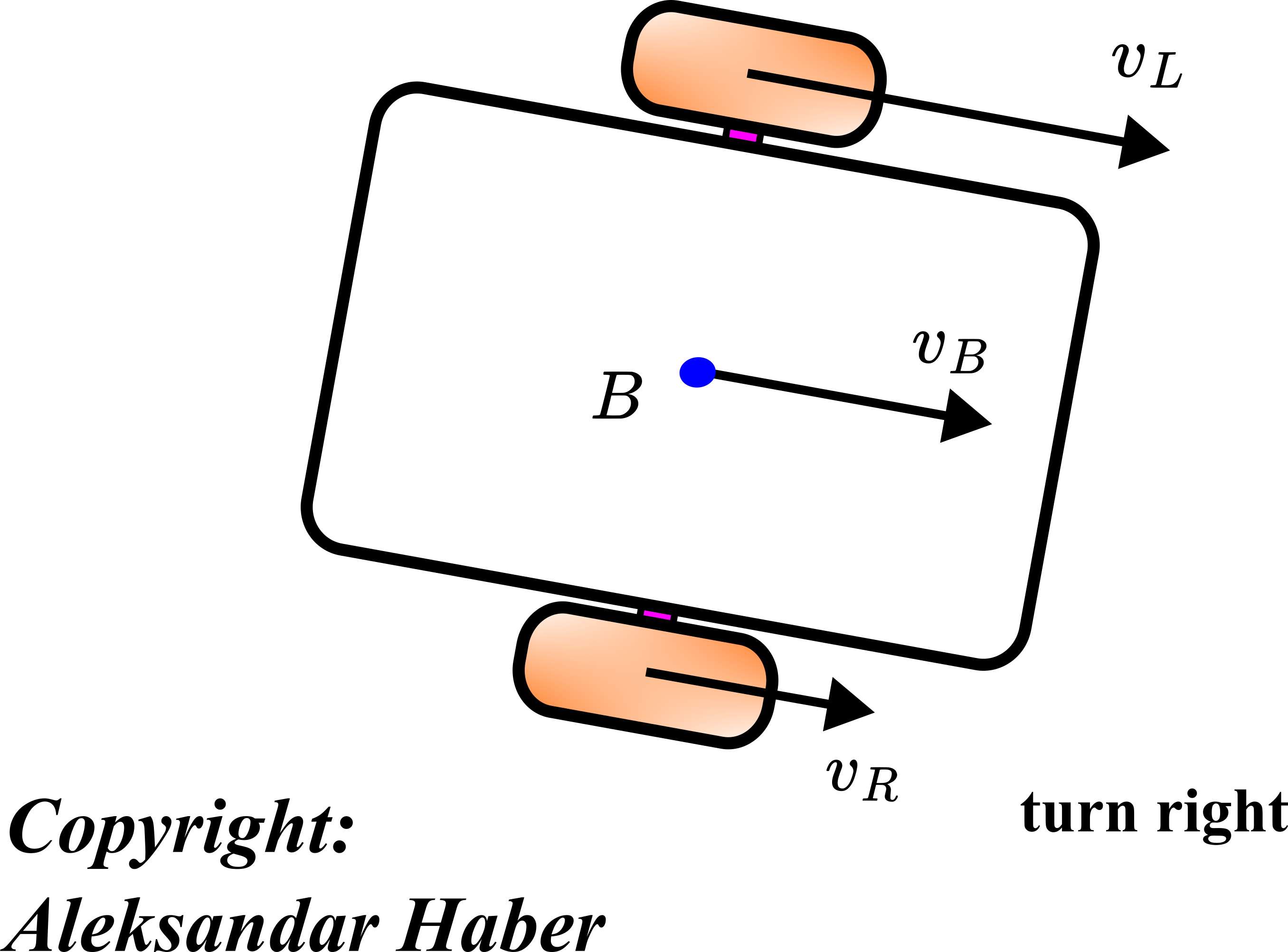
Figure 4: Top view of the differential drive robot. In this scenario, the robot is moving right.
The robot is moving right. This is because the intensity of the velocity
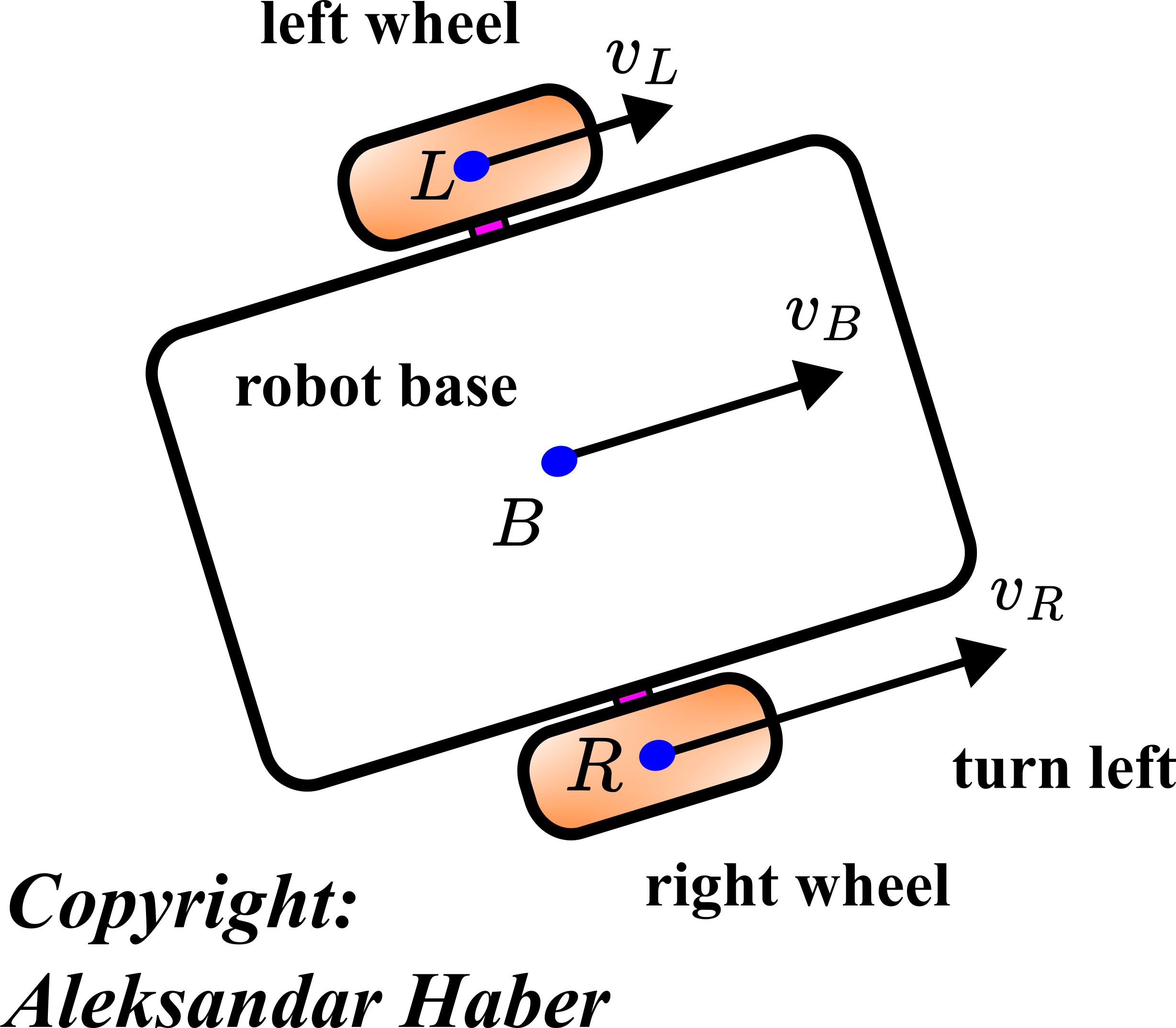
The figure below shows the final scenario.

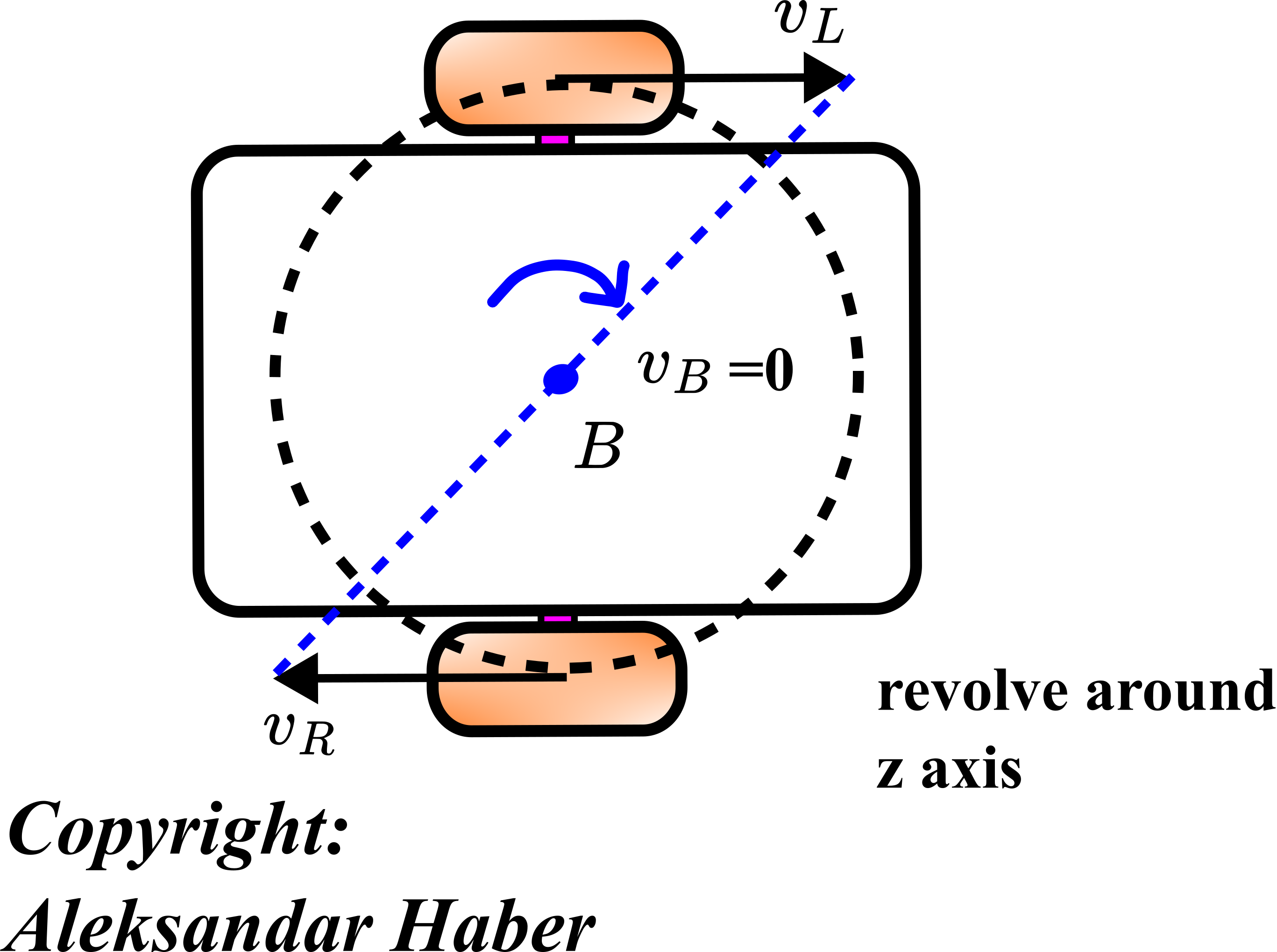
In the scenario shown in the figure above, the robot is rotating around the point
To conclude:
By changing the velocities of the centers of two wheels, or equivalently, by changing the angular velocities of the two wheels, we can control the robot’s motion.
Detailed Kinematic Analysis of Differential Drive Robot
Here, we provide a detailed kinematic analysis of the differential drive robot. We want to establish the equations that will relate the angular velocities of two wheels with the velocity of the center of the robot, and the angular velocity of robot rotation. In the next tutorial, we will solve the direct and inverse kinematic problem, that will establish a relationship between the position of the robot’s with the angles of rotation of two wheels.
The figure given below shows the kinematic diagram of the robot.

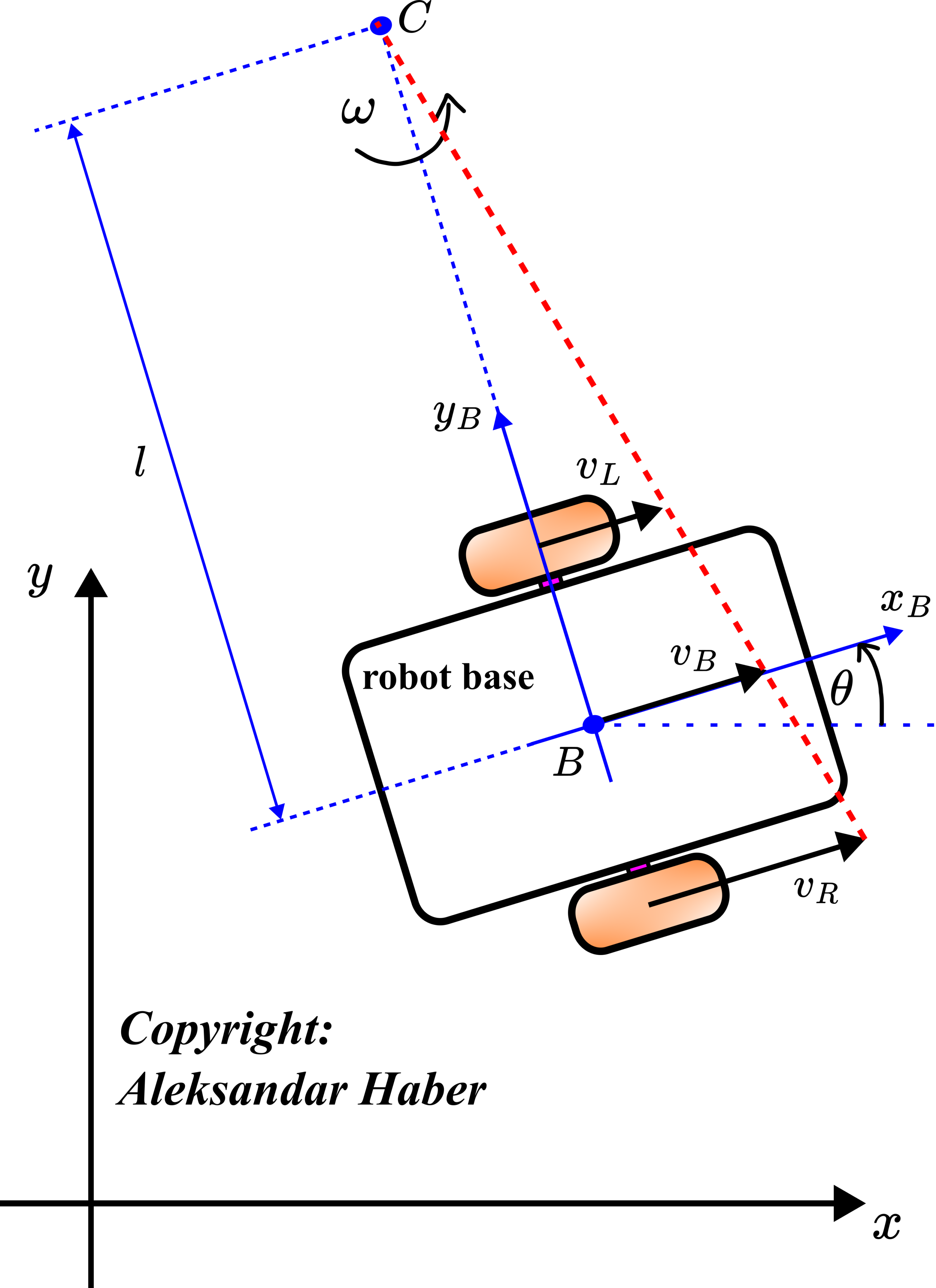
The coordinate system 



The point 


The angle 

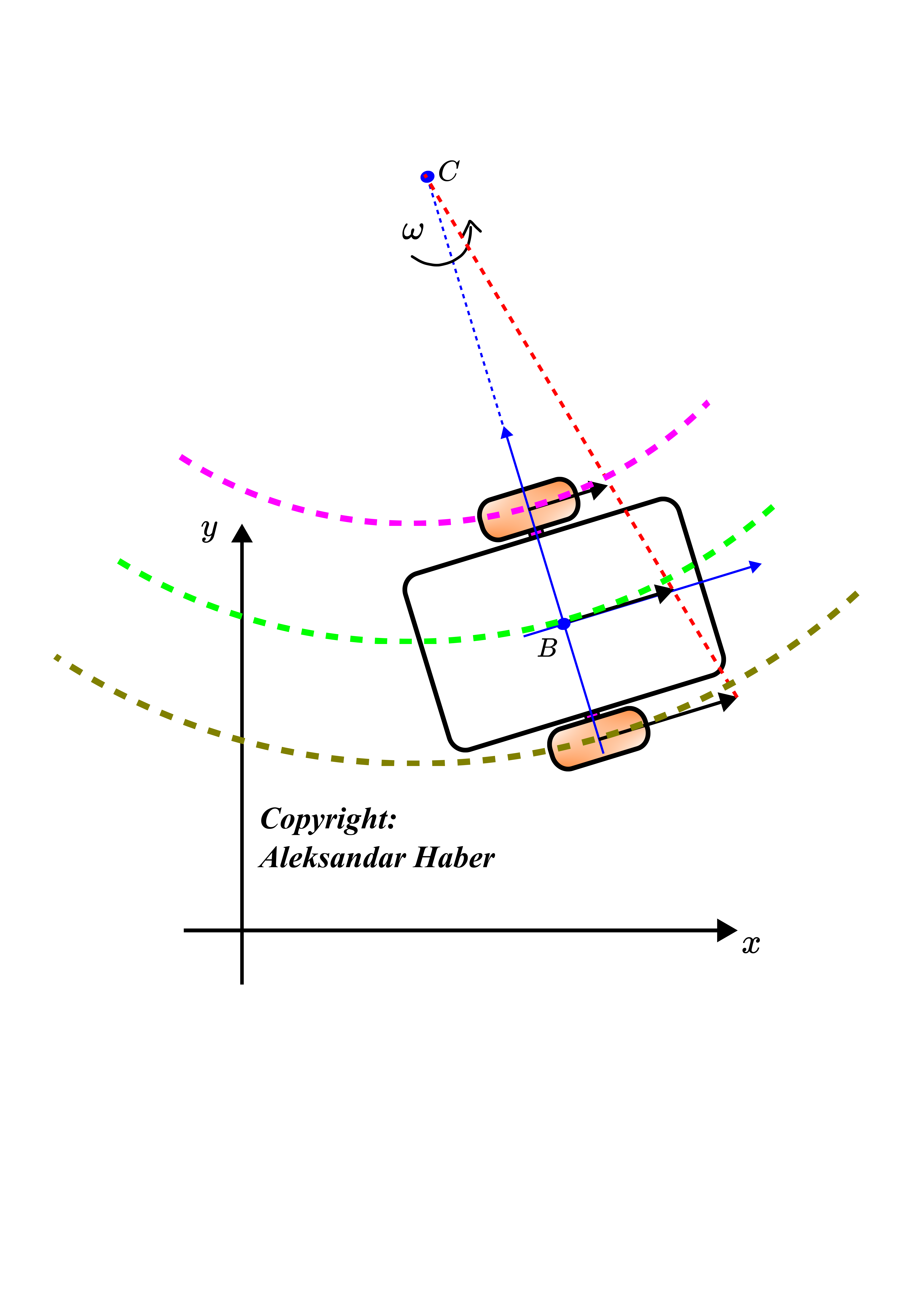
Under the assumption that the intensities of the velocities are not changing during a time interval, the points

The graph given below shows all the dimensions of the robot that are necessary for developing the kinematic equations.

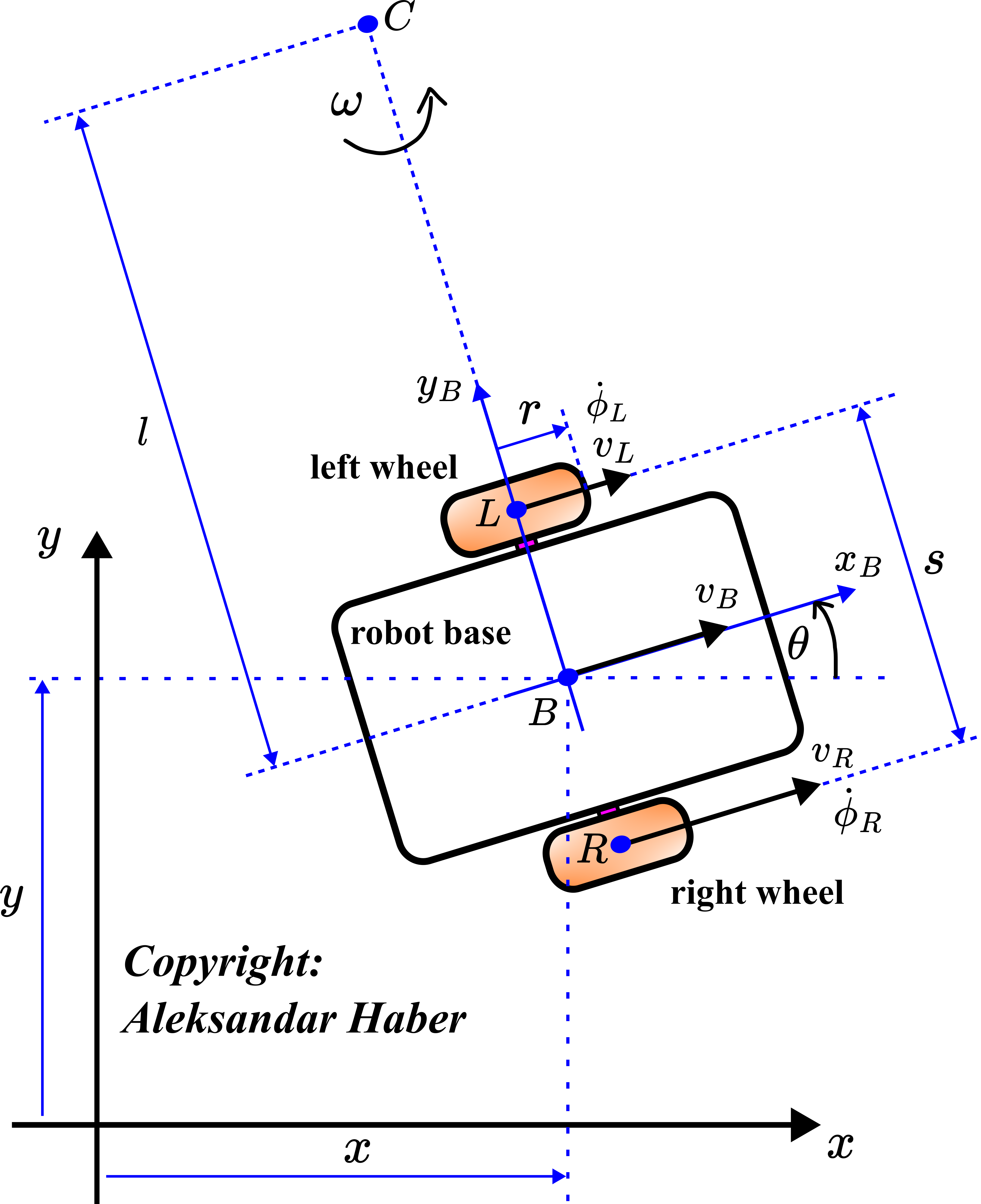
Here, for clarity of this lecture, we will summarize once more all the involved quantities





















In the sequel, we will derive the equations that will relate 

That is, we start from the assumption that the following quantities and parameters are known
From Fig. 8, we have
(1) 

The issue with these two equations is that both
(2) 

By substituting this equation in the first equation of (1), we obtain
(3) 

From the last equation, we obtain
(4) 

By substituting the last equation in the first equation of (1), we obtain
(5) 

From the last equation, we obtain
(6) 

For clarity, we repeat the expressions for
(7) 

From Fig. 8, we have
(8) 

The last set of equations can be written compactly
(9) 

On the other hand, we have that the intensity of the velocity
(10) 

By substituting the expressions for
(11) 

By combining this equation, with the equation for
(12) 

The last two equations can be written compactly
(13) 

By substituting the equation (13) into the equation (9), we obtain
(14) 

The last system of equations can be expanded as follows
(15) 

The system of equations (15) relates the controlled wheel velocities
(16) 

The last two equations can be compactly written in the vector-matrix form
(17) 

By substituting (17) in (14), we obtain
(18) 

The last equation can be written in the expanded form
(19) 

The equation (19) is the final equation derived in this tutorial. It relates the angular velocities of the wheels with the velocity projections of the center of the robot and the robot’s angular velocity. This equation enables us to predict the robot motion as we will explain in the next tutorial.