In this tutorial, we introduce a phase lag compensator, and we explain a procedure for designing the parameters of the phase lag compensators. At the end of this tutorial, we give an example of designing the phase lag controller for a second-order system with a low phase margin. Before reading this tutorial, it is a good idea to get yourself familiar with phase lead controllers. You need to read this tutorial and this tutorial.
The effects of the Phase Lag Compensator
- A phase lag compensator increases the phase margin and provides attenuation in the region near and above the gain crossover frequency (high-frequency range). Consequently, the relative stability of the system is improved.
- The gain crossover frequency is decreased and this decreases the bandwidth of the closed-loop system. This usually decreases the rise time and the settling time of the closed-loop system.
- The phase lag compensator approximates a Proportional Integral (PI) controller.
To illustrate the effect of the phase lead controller on the step response, consider the following system.
(1) 

The compensated system is
(2) 

The step responses of the compensated and uncompensated systems are shown in the figure below.

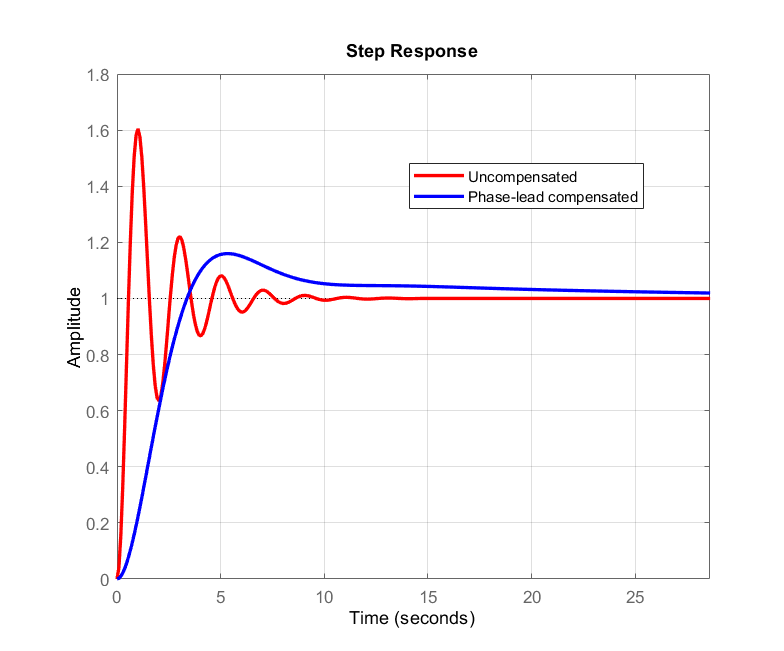
We can observe that the phase lag compensator reduces the damping of the step response and makes the system more stable. However, the price we have to pay is the slower step response.
The figure below graphically illustrates the main idea of the phase lag compensator.

Equations and Graphs Describing the Phase Lag Compensator
The phase lag compensator is described by the following equation:
(3) 

Obviously, it has a similar form to the form of the phase lead compensator, except for the crucial fact that 


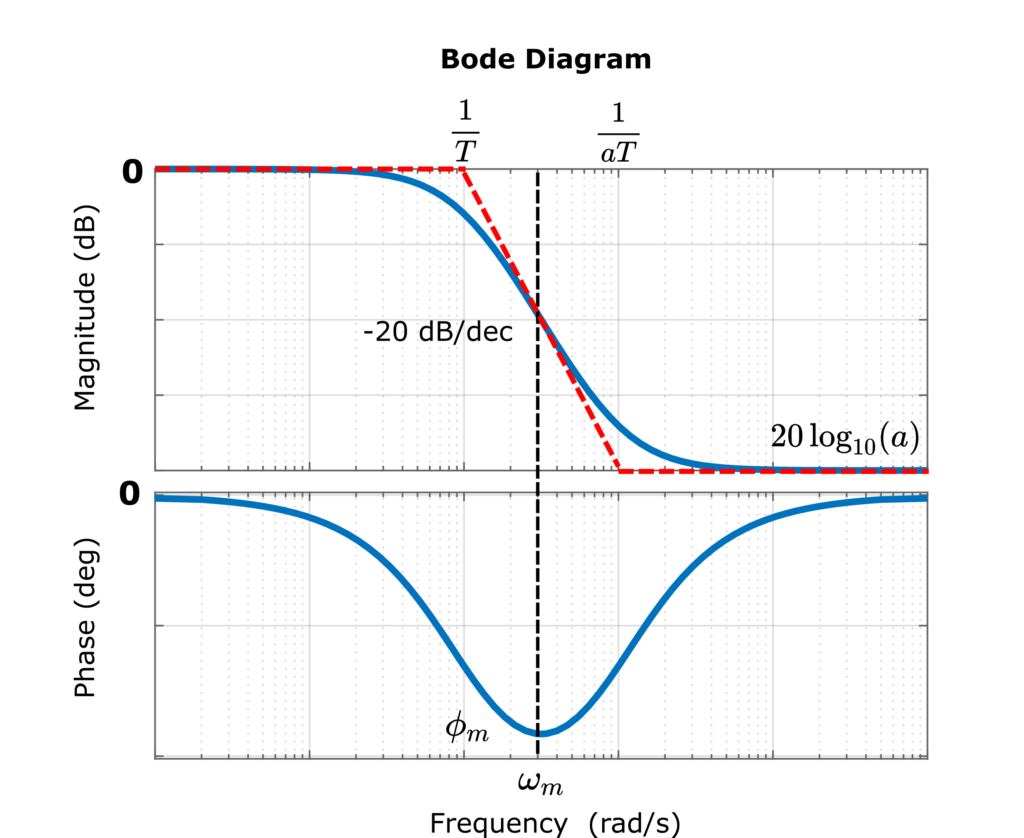
The most important observation from Fig. 3 is the asymptotic negative gain of 

Design Procedure for the Phase Lag Compensator
Design specification and goal: Achieve the Phase Margin (PM) of the compensated system that is larger or equal to the minimum desired value of the PM. Design the parameters 



(4) 
STEP 1: Plot the Bode diagram of the uncompensated open-loop system. Identify the phase margin of the uncompensated system. Determine the phase margin of the uncompensated system. Under the assumption that the phase margin needs to be increased, identify the frequency on the phase plot, for which the phase margin of the compensated system is 5 to 10 degrees larger than the desired phase margin. Let this frequency be called 

STEP 2: The goal of step 2 is to bring the magnitude curve to 





(5) 

where || is the absolute value. From this equation, we obtain the
(6) 

STEP 3: The next step is to select the parameter
(7) 

Consequently, we have the following equation for the design of the parameter
(8) 

STEP 4: Plot the Bode diagram of the compensated system and see if the desired specifications are met. If not, repeat the step 2,3, 4 by increasing the phase margin, and changing the parameter
Example of Designing Phase Lag Controller
PROBLEM: Consider the following open-loop system:
(9) 
Design the lag compensator such that the phase margin of the compensated system is at least 50 degrees.
SOLUTION: We follow the above-described procedure for designing the phase lag controller.
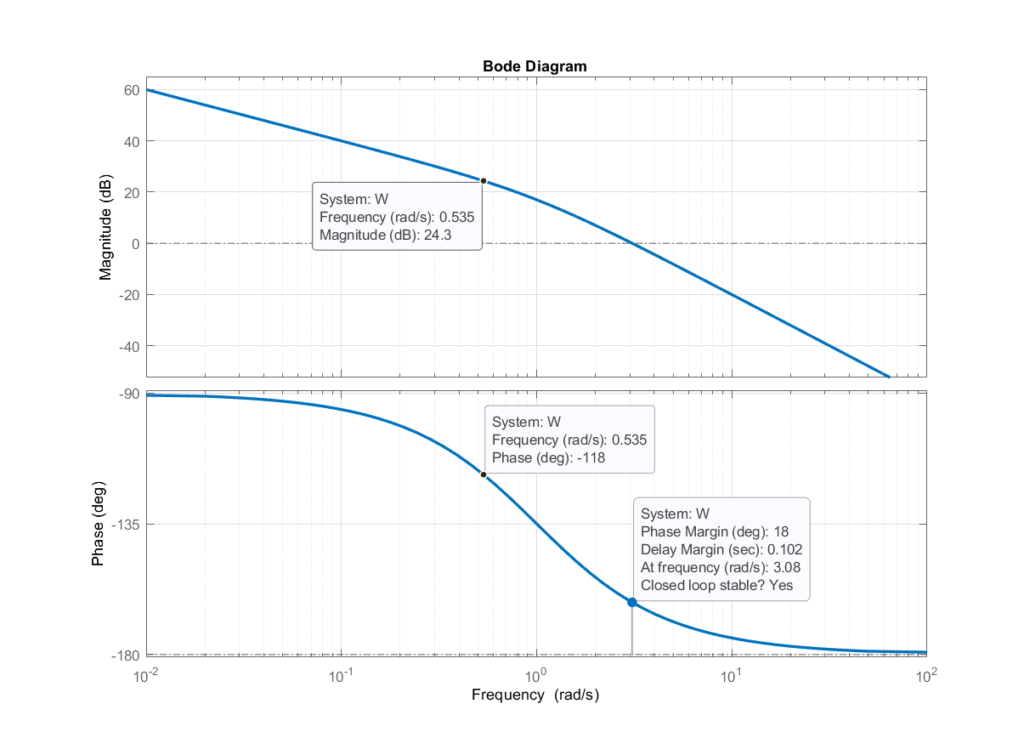
STEP 1: The Bode diagram of the uncompensated system is given below.

The step response of the uncompensated closed-loop system is given in the figure below.

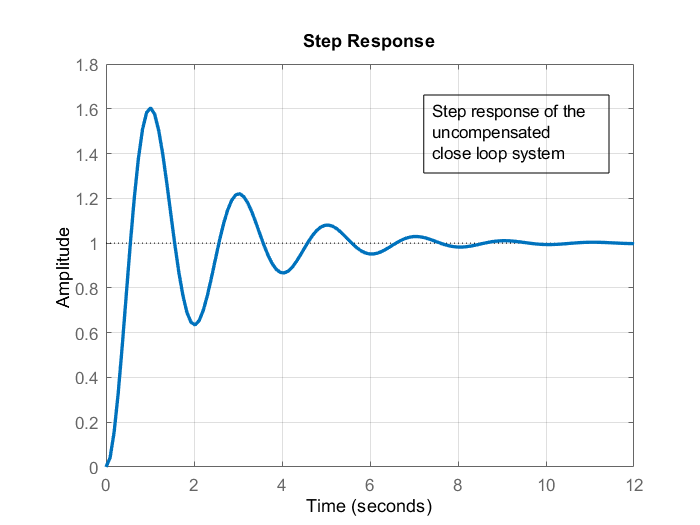
By analyzing the results shown in these two figures, we can conclude that the phase margin does not satisfy the minimum requirement of 50 degrees. Also, from the step response, we can observe that the transient step response is undamped. Our goal is to increase the phase margin by using the phase lag controller. The two figures presented above are generated by using the following MATLAB code lines
clear
W=tf(10,[1 1 0])
figure(1)
bode(W)
grid
figure(2)
WclosedLoopUncompensated=feedback(W,1)
step(WclosedLoopUncompensated)
grid
From the Bode plot of the uncompensated system (see the figure above), we choose the gain cross-over frequency of the compensated system as
(10) 

this gain frequency gives the estimated phase margin of the compensated system of 62 degrees, and that is 5 to 12 degrees larger than the desired minimum value of the phase margin.
STEP 2: From the Bode plot of the uncompensated system, we can observe that the necessary attenuation of the -24.3 [dB]. Consequently, we have
(11) 

STEP 3: We select
(12) 

The final compensator for the computed values of
(13) 

The MATLAB code lines used in steps 2 and 3 are shown below.
wc=0.535
Mc=24.3
a=10^(-Mc/20)
T=10/(a*wc)
Gc=tf([a*T 1],[T 1])
STEP 4: The Bode plots of the compensated and uncompensated systems are shown in the figure below.

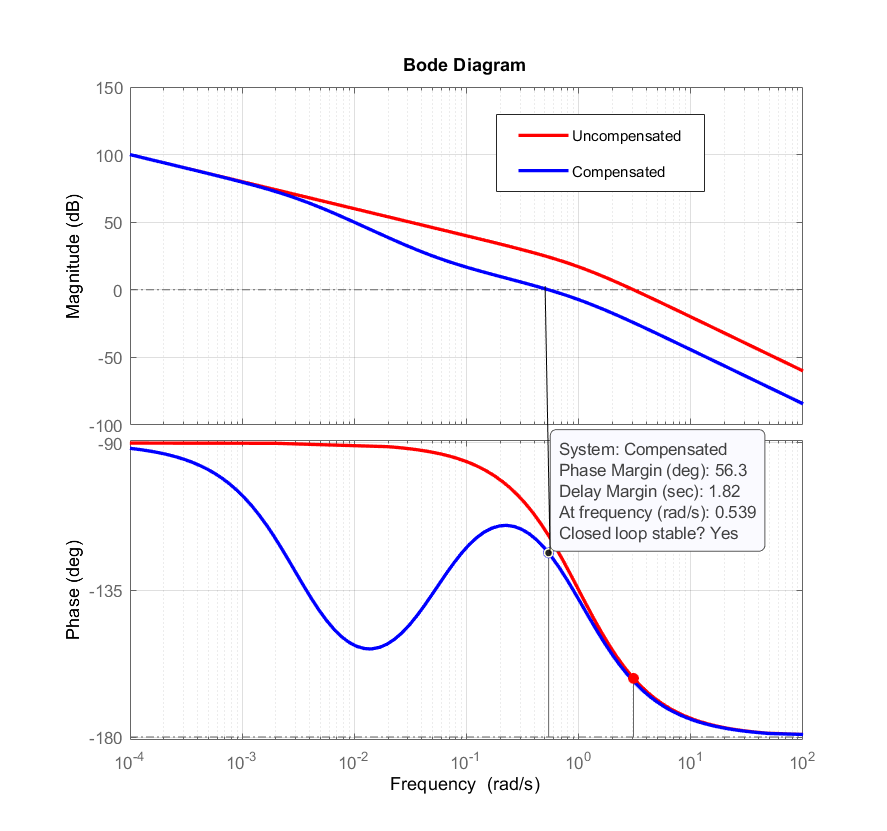
We can observe that the compensated system achieves the required phase margin, and the gain cross-over frequency is close to the estimated one. The figure below shows the step responses of the closed-loop compensated and uncompensated systems.
We can observe that the damping is attenuated, however, at the expense of the slower response. The system will eventually settle in the desired position of 

MATLAB code lines used to generate these two figures are shown below.
figure(3)
hold on
bode(W,'r')
bode(Gc*W,'b')
grid
figure(4)
WclosedLoopCompensated=feedback(Gc*W,1)
hold on
step(WclosedLoopUncompensated,'r')
step(WclosedLoopCompensated,'b')