In our previous post, which can be found here, we derived the main equations of the phase lead controller. Furthermore, in the same post, we summarized a procedure for designing the phase lead controller. In this post, we explain how this procedure can be used to design the parameters of the phase lead controller. The YouTube tutorial accompanying this tutorial is given below.

Problem
Consider the following open-loop system:
(1) 

Design the lead compensator such that the phase margin of the compensated system is at least 50 degrees.
Summary of the Design Procedure for the Phase Lead Compensator
Design specification and goal: Achieve the Phase Margin (PM) of the compensated system that is larger or equal to the minimum desired value of the PM. Design the parameters 



(2) 

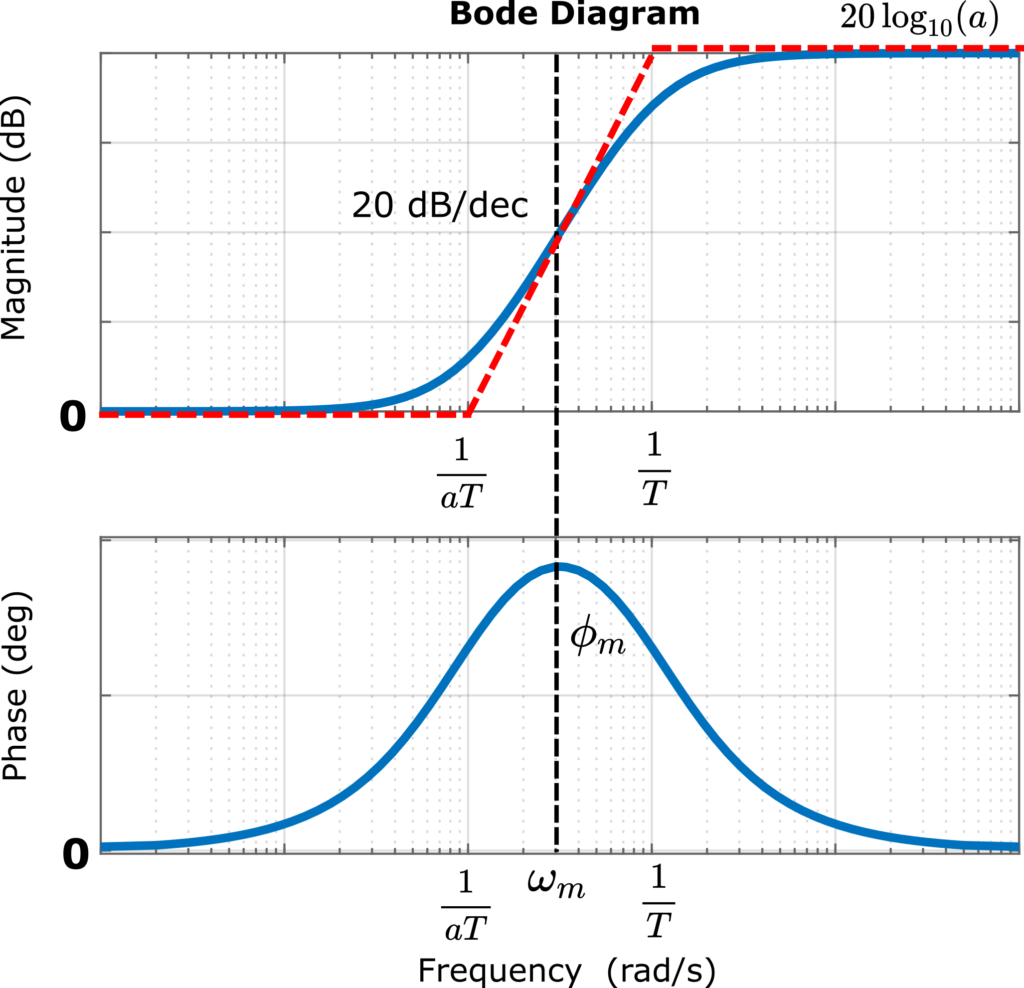
The Bode plot of the phase lead compensator is shown in the figure below.

PROCEDURE 1:
Step 1: Plot the Bode plot of the uncompensated system. Read the PM of the uncompensated system. On the basis of the PM of the uncompensated system and on the basis of the minimum desired PM, calculate the necessary value of 

Step 2: For calculated
(3) 

Step 3: Select 



Step 4: Select the parameter
(4) 

Step 5: Plot the Bode plot, and check if the design specifications are met. If they are met, then we have designed the filter parameters
Solution
Here, we present the solution of the problem. The MATLAB codes are given after each graph.
STEP 1: The bode plot of the open-loop system is given below.

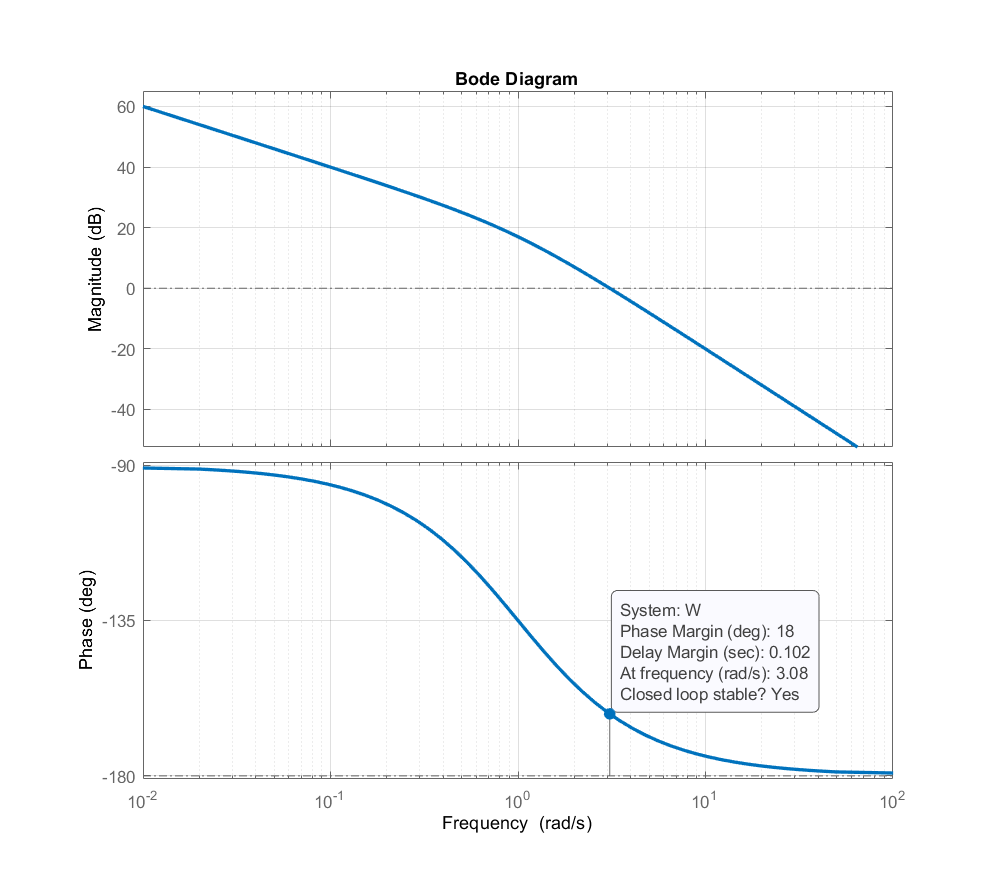
We can observe that the phase margin of the open-loop uncompensated system is 



(5) 

Here, it is also instructive to plot the step response of the closed-loop system without the compensator. The step response of the closed-loop system is given below.

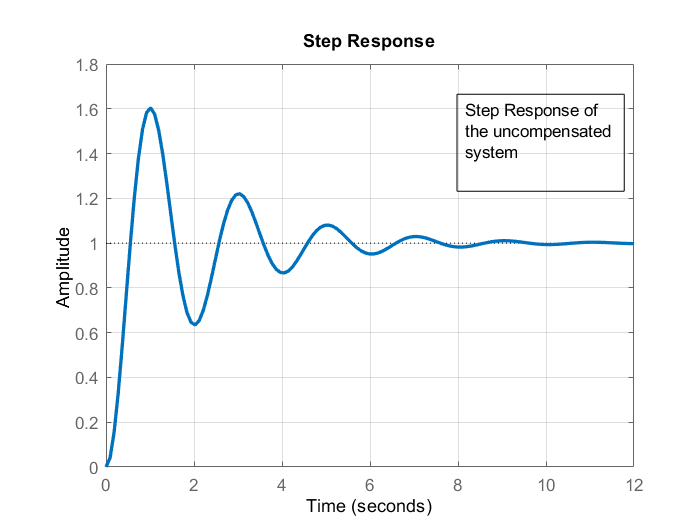
From Fig. 3., we can observe that the main issue with the step response of the closed loop of the uncompensated system is the large damping ratio. By increasing the phase margin, we will decrease the damping without affecting the steady-state characteristics.
We used the following MATLAB code lines to generate these plots
W=tf(10,[1 1 0])
figure(1)
bode(W)
Wfeedback=feedback(W,1)
figure(2)
step(Wfeedback)
STEP 2: We use the following formula to determine the parameter
(6) 
Before we can implement this formula in MATLAB, we need to convert the degrees to radians. We have
(7) 

By substituting this value in (6), by using MATLAB, we obtain
(8) 

We used the following MATLAB code to compute
phiM=50-18
phiMr=phiM*pi/180
a= (1+sin(phiMr))/(1-sin(phiMr))
STEP 3: We have that
(9) 

By searching for the frequency that produces this magnitude (gain) from Fig. 2, we obtain 

STEP 4: The parameter
(10) 

The MATLAB code is given below
wc=4.15;
T=1/(sqrt(a)*wc)
STEP 5: The Bode plot of the compensated system in the first iteration is given below

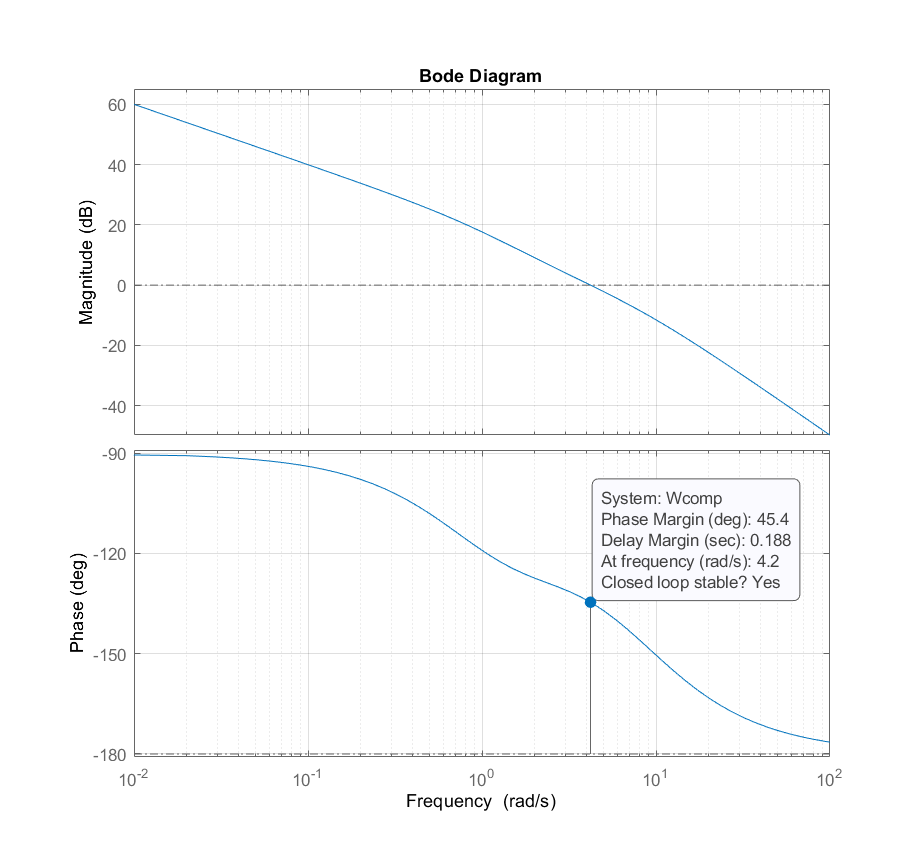
We can see that the phase margin improved. However, it is still 5 degrees less than the desired value of 50 degrees. Consequently, we need to repeat the steps 2,3,4, and 5, by increasing the value of
This graph is generated by the following MATLAB code:
Gc=tf([a*T 1],[T 1])
Wcomp=Gc*W
figure(3)
bode(Wcomp)
REPETITION OF STEPS 2,3,4, and 5:
Here, we increase the value of 
(11) 

The compensator is given by
(12) 

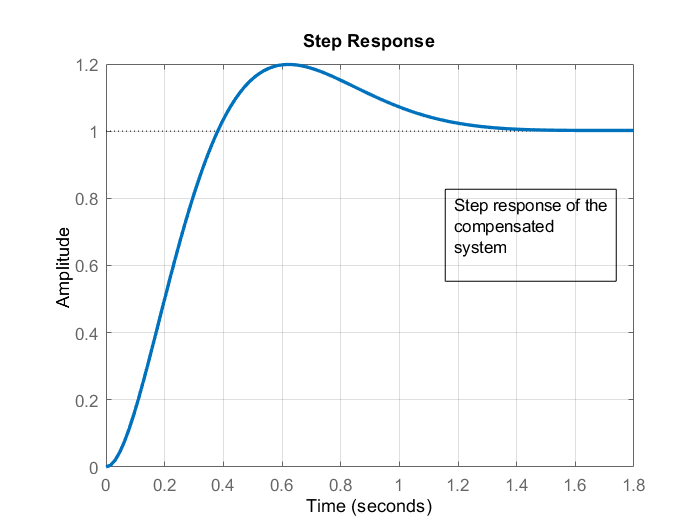
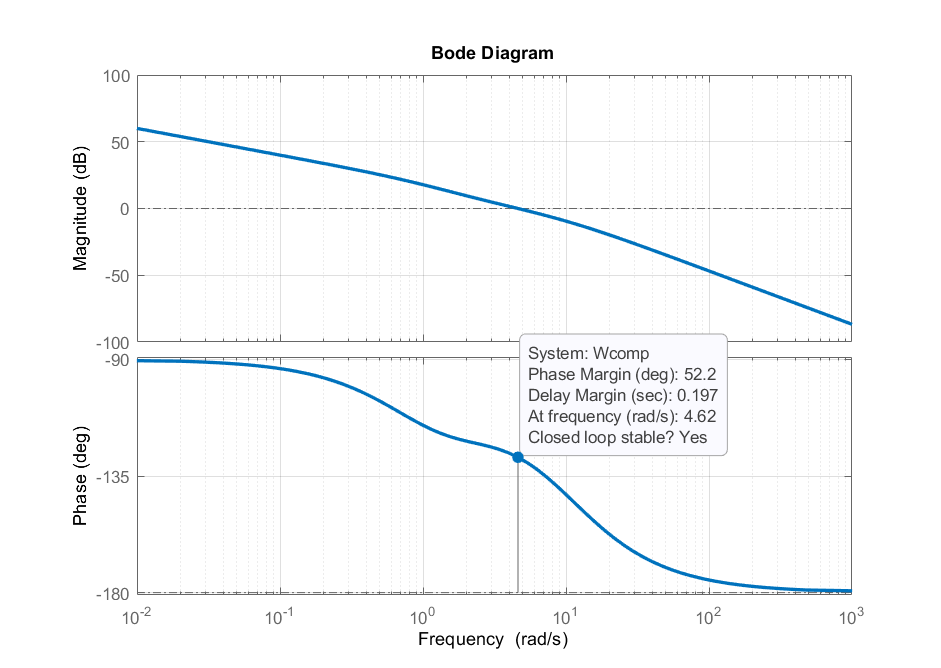
The compensated system for this value is shown below.

The step response of the compensated system is given below. We can observe that the damping is significantly reduced as well as the settling time.