In this post, we explain how to analytically compute a transient response of a prototype second-order linear dynamical system. We start from a generic (prototypical) form of the second-order system, and we explain how to compute its step response (transient response) by using the inverse Laplace transform. The derivation and analysis presented in this post are very useful for understanding the transient response of linear dynamical systems and how different parameters, such as damping, natural frequency, etc. influence the transient response behavior. The YouTube video accompanying this post is given here

The prototype second-order system has the following form:
(1) 

where






In this post, we derive the expression for the step response of the system (1). The step response is given by the following equation
(2) 

This equation can also be written as follows
(3) 

The general form of the second-order transfer function given by (1) is often used in control systems textbooks and articles. Moreover, many properties of the dynamical systems are often expressed in terms of the undamped natural frequency 

The poles of the dynamical system (1), are computed as follows:
(4) 

(5) 

where 
(6) 

These poles have a very useful graphical interpretation given in the figure below.

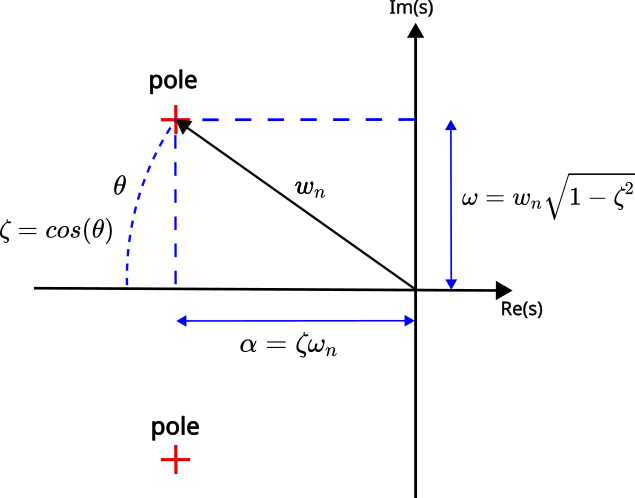
Here is an interpretation of Fig. 1:
- The natural undamped frequency
- The damping ratio

- The parameter

- When


(7)

- The parameter







In the sequel, we derive an analytical expression for the step response of the system (1). The output of the system can be represented as follows:
(8) 

Since we are interested in the step response, we assume 

(9) 

We use partial fraction expansion to compute the response. The partial fraction expansion of (9) is given by
(10) 

We first need to determine the constants 




(11) 

The constant
(12) 

Here, we used the following expression
(13) 

which originates from the following fact
(14) 

Going back to (12), we obtain
(15) 

Next, we substitute the expressions for 
(16) 

Next, let us write the complex number 

(17) 

On the other hand, from Figure 1, we have that
(18) 

By substituting (18) in (17), we obtain
(19) 

Substituting (19) in (16), we obtain
(20) 

Next, we compute the constant
(21) 

Next, by substituting (6) in (21), we obtain
(22) 

By using the previously explained polar transformation of complex numbers, we obtain
(23) 

Now, taking into account that 

(24) 

By using (11), (20), and (24), we can write (10) as follows
(25) 

Now, we need to find an inverse Laplace transform of (25). We need the following inverse Laplace transforms
(26) 

By using these inverse transforms, from (25}), we obtain
(27) 

Next, we use the following trigonometric identity
(28) 

for some angle 

(29) 

Next, we use the following trigonometric expression
(30) 

By using this expression in (31), we obtain
(31) 

That is, the final expression is given by
(32) 
Using the procedure explained in the post that can be found here, we can also write the equation (32) as follows
(33) 
