In this tutorial, we explain how to write a first ROS2 Jazzy program in Python. We explain how to implement subscriber and publisher nodes in Python from scratch. In particular, we explain
- How to write and build a ROS2 Jazzy Python package from scratch.
- How to write Python classes and implement subscriber and publisher nodes in Python.
- How to implement timer and callback functions that govern message transmission and message receiving in Python and ROS2.
- How to send and receive messages of different data types. In practice, these messages can be control actions or sensor measurements.
- How to properly configure and run two ROS2 nodes simultaneously.
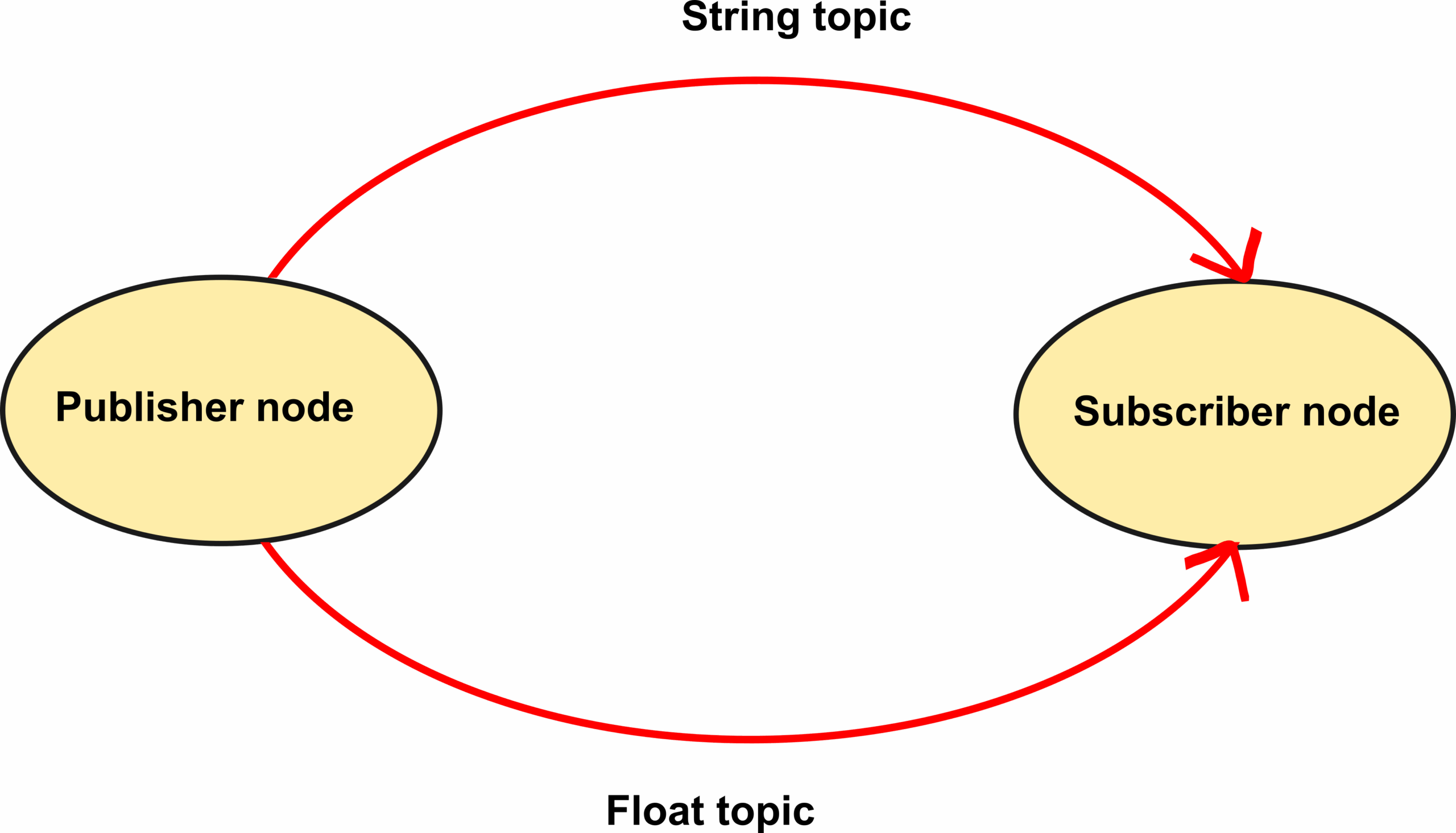
The figure given below illustrates the ROS2 communication structure that will be implemented in this tutorial. We implement two nodes: publisher and subscriber nodes. The publisher node publishes two messages over two topics. The first message is of a string data type. The second message is of a float data type. These two messages are sent over two different topics. On the other side, we implement a subscriber node. The subscriber node subscribes to these two communication topics, receives the messages and prints them in a terminal. This is a proof of principle for more complex and realistic ROS2 communication structures and graphs.