In this ROS2 Jazzy tutorial, we explain how to parametrize robot models by using the Xacro language. Xacro is an XML macro language that enables us to completely parametrize the robot description and write more readable and compressed robot model files. It is an extension and addition to the Unified Robot Description Format (URDF) language for modeling the robot geometry and dynamics properties. The material presented in this tutorial is of paramount importance for modeling and visualizing robot geometry and dynamics properties.
In particular, in this tutorial we explain:
- How to write a ROS2 package and a Python launch file for displaying a robot model in RViz.
- How to parametrize the robot geometry and dynamics description by using the xacro macro language.
- How to implement mathematics formulas in xacro.
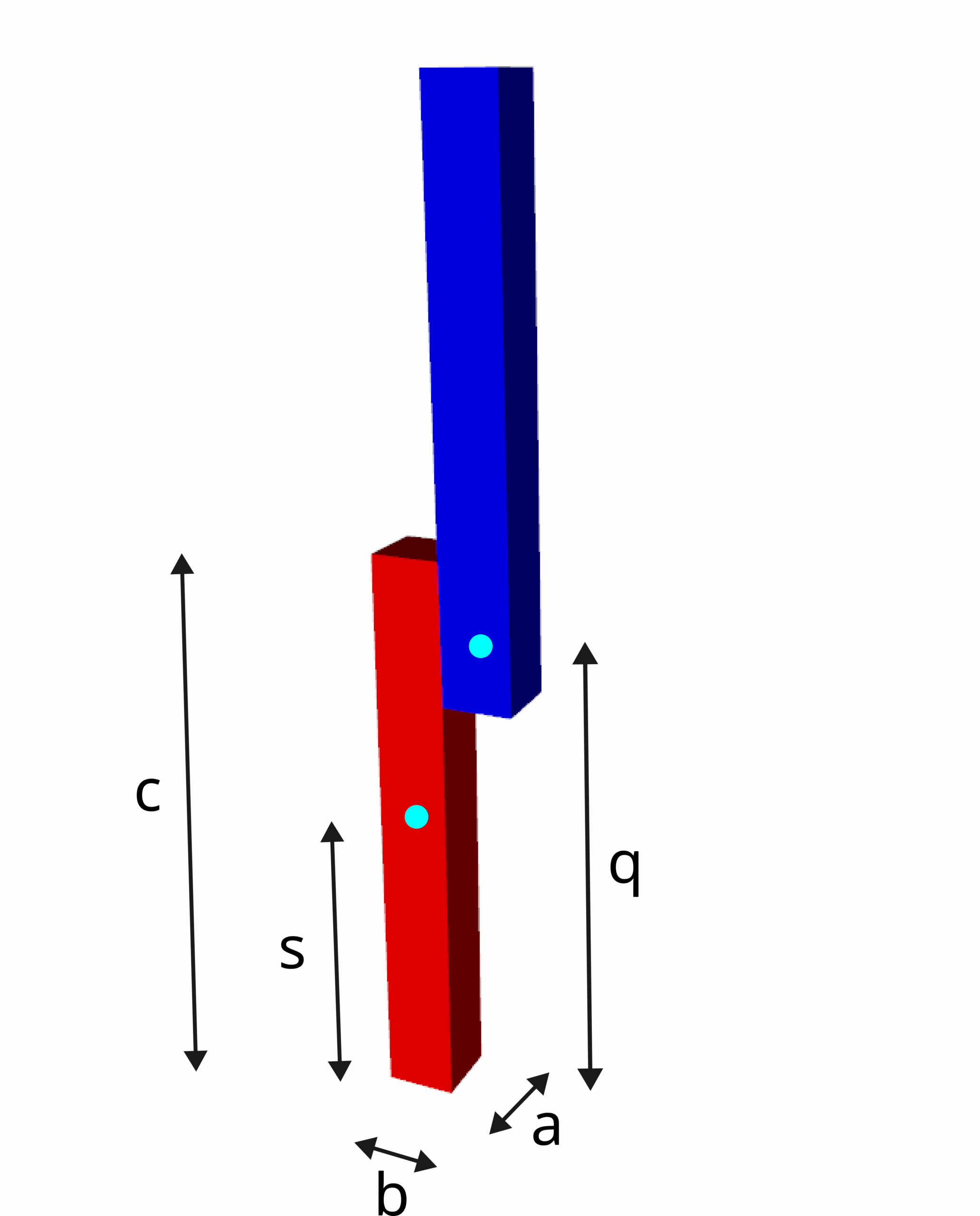
For presentation clarity and brevity, we construct an example of a robot consisting of two links and a single joint. However, everything explained in this tutorial can be generalized to more complex robot geometries and models.
The YouTube tutorial is given below.