In this control engineering tutorial, we derive the natural undamped frequency, damping ratio, and transfer function of a mass-spring damper system. The YouTube tutorial is given below.
Consider the mass-spring-damper system shown in the figure below.

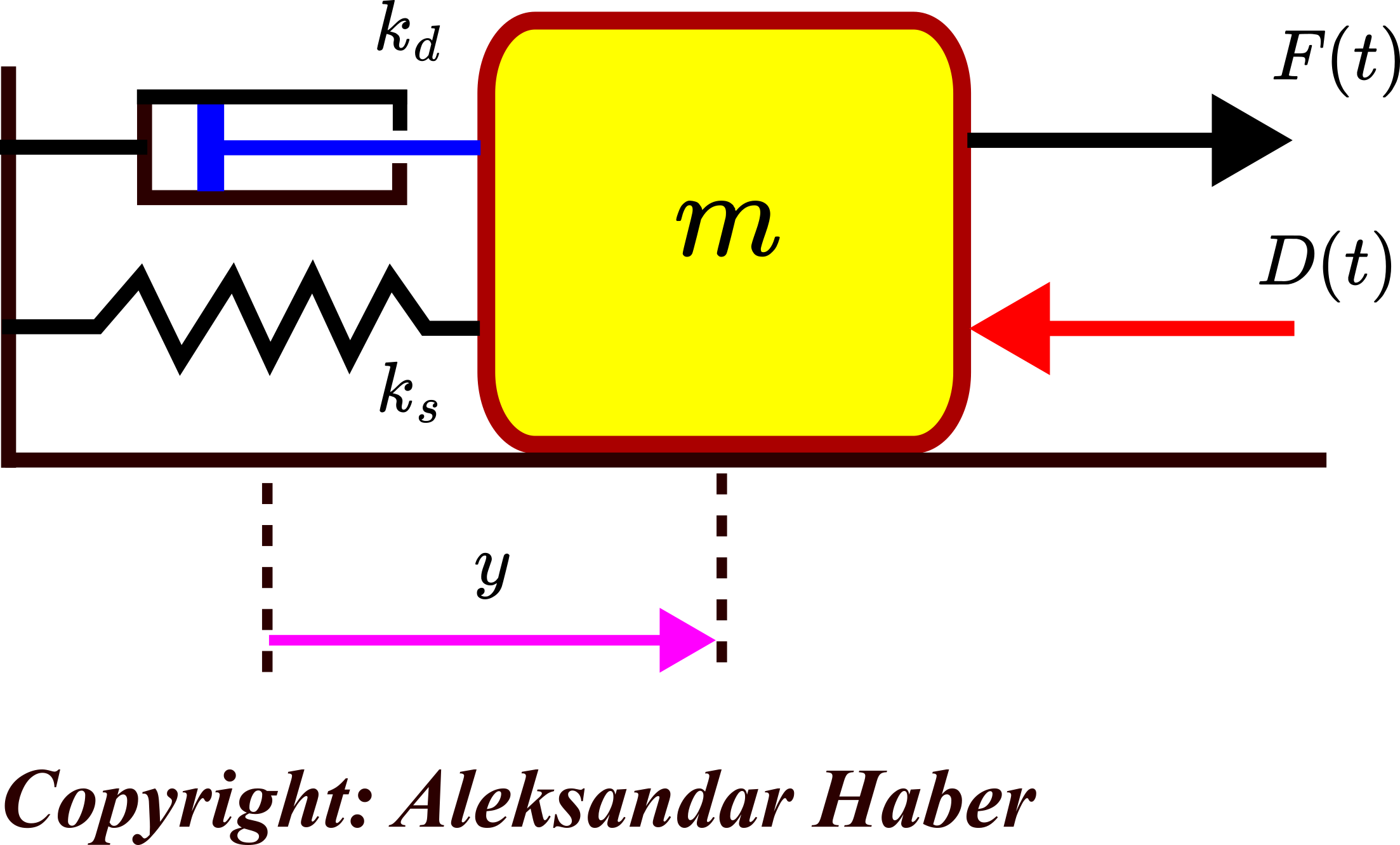
In the figure above, 











(1) 

where 


Our goal is to transform the model (1) into the prototype transfer function form of the second-order system:
(2) 

where













From (2), we have
(3) 

By applying the inverse Laplace transform to the equation (3), we have
(4) 

On the other hand, by dividing (1) by
(5) 

By comparing (4) and (5), we obtain
(6) 

From the second equation in (6), we obtain the natural undamped frequency as a function of the spring constant
(7) 

By substituting (7) in the first equation of (6), we obtain
(8) 

Finally, we obtain the damping ratio as the function of the damping constant
(9) 

By using (7) and (9) in (5), we obtain
(10) 

By defining
(11) 

and by substituting (11) in the second equation of (10), we obtain
(12) 

By applying the Laplace transform to (12), we obtain the system description in the Laplace domain
(13) 

where 


