Consider a robotic manipulator with two degrees of freedom shown in the figure.

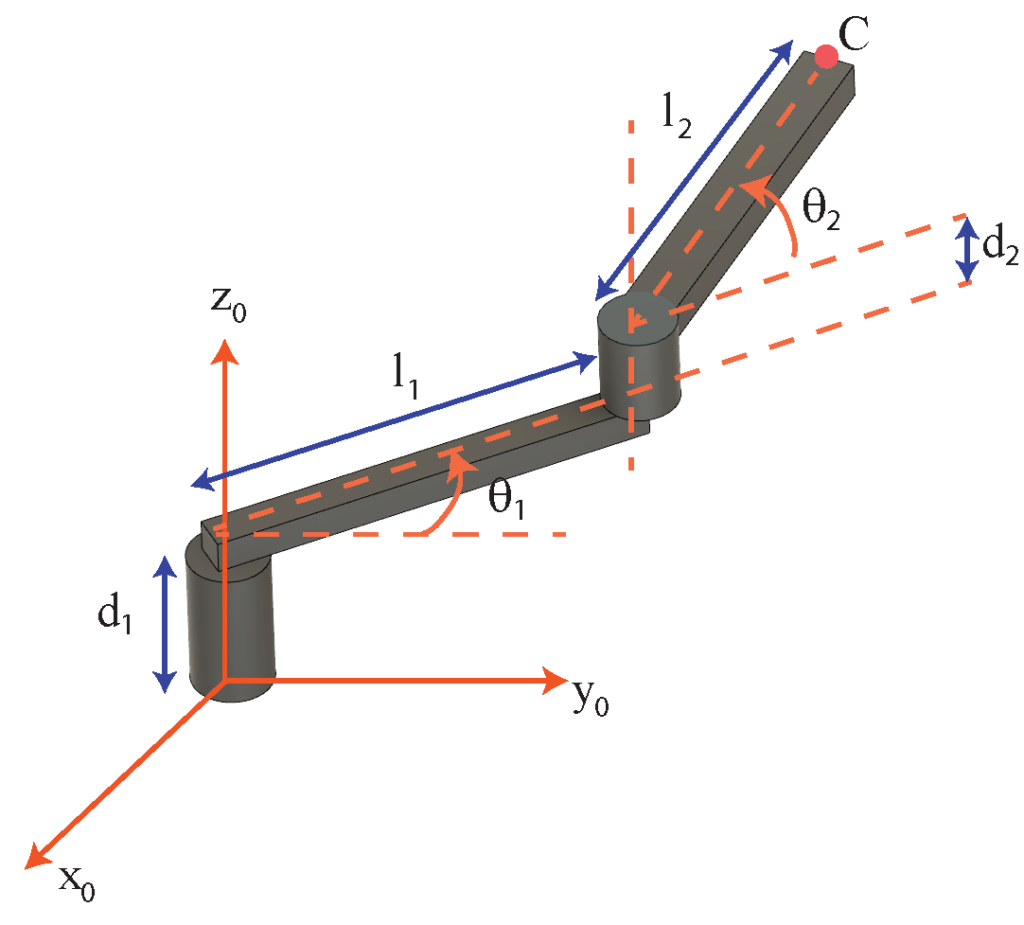
The manipulator can rotate around axis 











Your task is to
- Assign coordinate systems to every joint.
- Construct rotation matrices and homogeneous transform.
- Represent the coordinates of the end-effector point




Important notes:
- The submission deadline is Friday, January 28, at 12:00PM, during the class. Only printed copies will be accepted. Please do not email the homework assignments.
- You are expected to write equations, text, and graphs in appropriate software. Hand-written homework assignments will not be accepted. Latex software is a good option for writting the homework assignment, see for example the online tutorial given below.
- Plagiarism will not be tolerated.