In this reinforcement learning tutorial and in the accompanying YouTube video, we explain the meaning of the state value function and its Bellman equation. The motivation for creating this post and tutorial comes from the fact that the (state) value function and the corresponding Bellman equation play the main role in a number of reinforcement learning algorithms as well as in dynamic programming methods. On the other hand, in a number of books on reinforcement learning, the value function is only mathematically defined without providing the reader an intuitive understanding of its true meaning (if such a thing as “true meaning” exists at all since “true meaning” is definitely a philosophical term that has many interpretations). Usually, “heavy” probabilistic mathematics is involved in the definition, and students often cannot grasp the main idea behind this definition. This post aims at providing a clear understanding of the (state) value function.
Classical, “complex”, textbook definition of the value function and Bellman equation with Example
Here, we will follow the classical approach for defining the value function that can be found in many textbooks on reinforcement learning. This section uses the notation and partly follows the classical textbook on reinforcement learning
Sutton, R. S., & Barto, A. G. (2018). Reinforcement Learning: An Introduction. MIT Press.
As I mentioned previously, the proper understanding of definitions stated in this section, is often difficult for an average student and especially for students who are only interested in practical aspects of reinforcement learning. However, do not lose hope if you cannot understand the definitions stated in this section immediately! Hopefully, you will be able to understand them by the end of this tutorial (subsequent sections will be more “down to earth” when it comes to mathematics).
We have an agent that applies actions to a system or environment. The system can for example be a robotic manipulator or an autonomous driving vehicle. The agent can be a human or a control system. At a discrete time instant 













This process generates a trajectory of states, actions, and rewards given below
(1) 

Here we should keep in mind that 








We illustrate the introduced concepts in this section with an example shown in figure 1.

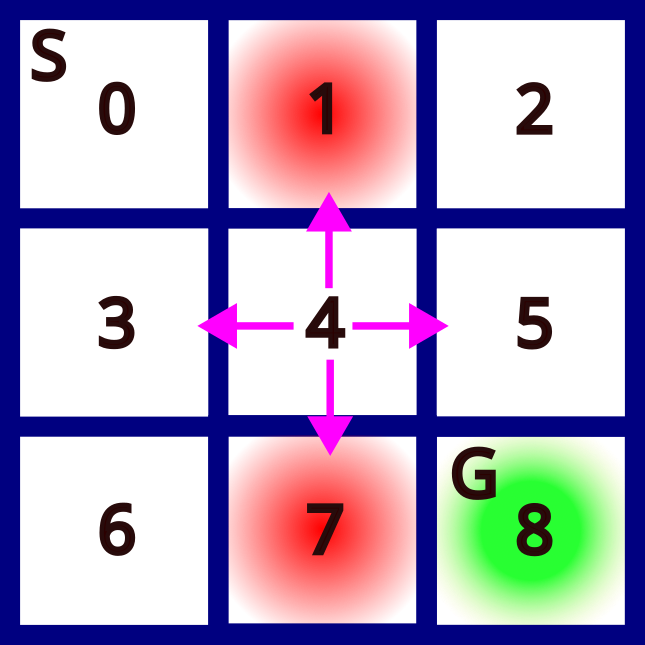
Figure 1 represents a grid world game. The starting state is the state “S” that is enumerated by 

An episode is a series of actions, states, and rewards that start at the start state S and that end at the goal state G. An episode is shown in the figure below.


The actions are DOWN, LEFT, LEFT, DOWN. The states are 



In the classical formulation of reinforcement learning problems, the environment response, obtained rewards, and agent actions are stochastic, that is, they are described by probabilities. The first important probability is the dynamics of the system or environment. This probability is also called the dynamics of the Markov Decision Process (MDP) and is defined as follows:
(2) 

In words, the dynamics of the MDP is the probability of reaching state 



Another important definition is the definition of the state transition probability:
(3) 

In words, the state transition probability is the probability of reaching state
Here, immediately, a few things have to be noticed
- The state at the previous time instant
- When the environment is in state
Let us consider again the grid world game example introduced at the beginning of this section. Let us assume that we are at the state 0, and let us assume that in this state, the state transition probabilities for the action down are
(4) 

This means that although we perform action “DOWN” in state 0, this does not necessarily man that we will always go to the state 3 that is below the state 0. There is a probability of 0.6 that this will happen. For example, if we perform the action DOWN 100 times from state 0, approximately 60 times we will go to the state 3. Also, there is a probability of 0.2 that we will not move at all, that is that we will stay in the state 0. That is, the environment is stochastic or random!
The next concept we need to introduce is the concept of return. Let the sequence of the rewards obtained after the discrete-time step 

- The undiscounted return for finite episodes is defined by
(5)

where
- Discounted return for finite episodes
(6)

where![\gamma \in [0,1]](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-8b206a92a67abcc0be1c608f0e8f97ac_l3.png "Rendered by QuickLaTeX.com")
- Discounted return for infinite episodes
(7)






For the explanation given in the sequel, it does not matter which definition we will use since these three definitions are not significantly changing the main ideas of the theoretical concepts that are developed in the sequel.
Here, a few important things should be kept in mind. Since the rewards 

Also, from (7), we have
(8) 

Informally speaking, the goal of the reinforcement learning algorithm and its agent is to determine a series of actions that will maximize the return. However, we immediately arrive at one problem. Namely, since the return is a random variable, we cannot simply maximize the return. We actually need to maximize the expected return! This naturally leads us to the definition of the (state) value function. But before we introduce the state value function, we need to introduce the concept of the (control) policy.
The policy, denoted by 





(9) 

Here again, one important thing should be noticed. In the general problem formulation, the (control) policies are not deterministic! That is, in a particular state
Let us go back to our grid world example once more. In state 4, the policy can for example be the following one
(10) 

These probabilities are illustrated in the figure 3 below.

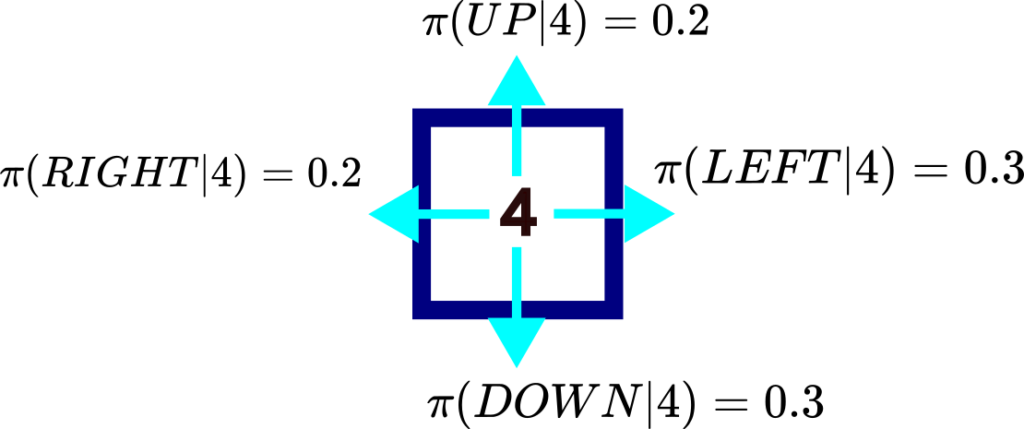
This policy makes sense since left and down actions have a higher probability since they lead us closer to the goal state G.
Now, we are finally ready to define the value function.
Definition of the value function: The value function of a particular state 



(11) ![\begin{align*}v_{\pi}(s)=E_{\pi}[G_{t}|S_{t}=s]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-145b4d0cdc0a24b5e3bdaf84cae7dcf1_l3.png "Rendered by QuickLaTeX.com")

here ![E_{\pi}[\cdot]](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-d8ca3e5443f3f8c37be84d5af753d326_l3.png "Rendered by QuickLaTeX.com")
A very important equation that enables us to iteratively compute the value function is the Bellman equation for the state value function
Bellman equation for the state value function
(12) ![\begin{align*}v_{\pi}(s) & =E_{\pi}[G_{t}|S_{t}=s] \\v_{\pi}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-b73654d861dc49f013a4f2ca6f4a5898_l3.png "Rendered by QuickLaTeX.com")

where 

Easy-to-understand derivation of the Bellman equation for the state value function is given here.
The Bellman equation for the state value function (12) looks very complex at a first glance. The goal of this post is to deconstruct the meaning of this equation and to help the interested reader to obtain a proper understanding of this equation, such that he or she can implement reinforcement learning algorithms that are based on this equation and on similar equations. Again, it is worth noting that this equation is the basis for a number of algorithms. Consequently, it is of paramount importance to properly understand this equation.
Meaning of the State Value Function
Let us now deconstruct the meaning of the state value function. We first need to obtain an intuitive understanding of mathematical expectations.
Understanding of expectations: Let us consider the game of throwing or rolling a six-sided die. Let us assume that the die is fair and that all sides are equally possible. We have six events or outcomes: 



The question is: “What is the expectation of throwing the die experiment?”
The expectation is defined by:
(13) ![\begin{align*}&E[X] =\sum_{i=1}^{6}x_{i} \\&=p(x_{i})=x_{1}p(x_{1})+x_{2}p(x_{2})+x_{3}p(x_{3})+x_{4}p(x_{4})+x_{5}p(x_{5})+x_{6}p(x_{6})\\& =\frac{1}{6}1+\frac{1}{6}2+\frac{1}{6}3+\frac{1}{6}4+\frac{1}{6}5+\frac{1}{6}6=3.5\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-04408811e061c4efd707cad85dd3a68c_l3.png "Rendered by QuickLaTeX.com")

On the other hand, the average or the mean of the outcomes is
(14) 

So the expectation is the same as the average in this case. So, why this is the case?
Let us imagine the following scenario. Let us throw the die 600 times. Since the dia is unbiased, we expect that approximately 100 times we will obtain 1, 100 times we will obtain 2, 100 times we will obtain 3, 100 times we will obtain 4, 100 times we will obtain 5, 100 times we will obtain 6. Let us compute the average:
(15) 

In the more general case, when some events are more likely, the expectation can be seen as a weighted average, where weights are proportional to the probability of occurrence of the event.
In other words, the expected value can be seen as a mean of numbers generated such that the number of times these a number appear matches the number’s probability of occurring. For example, let us say that our die is not fair. That is, the number 6 appears with 0.7 probability, and other numbers appear with a 0.06 probability. Then the expectation of the event of rolling a die is
(16) ![\begin{align*}E[x] & =0.06\cdot 1+0.06\cdot 2+0.06\cdot 3+0.06\cdot 4+0.06\cdot 5+0.7\cdot 1 \\& = 5.1\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-09078d045f7c8d267ad292d27f5a3806_l3.png "Rendered by QuickLaTeX.com")

On the other hand, let us assume that we repeat this experiment 600 times. We should expect to see 1 approximately 36 times (probability of 0.06), 2 approximately 36 times, 3 approximately 36 times, 4 approximately 36 times , 5 approximately 36 times, and 6 approximately 420 times. Consequently, the average is
(17) 

Now that we understand the expectations, we can proceed further and explain the meaning of the value function.
Meaning of the value function- simple deterministic case:
We consider the environment shown in the figure below.


The start state is 0 and the end state is 4. Let us assume that in the states 1,2,3, and 4, we always obtain a constant reward of
(18) 

Let us assume that we have a deterministic policy:
(19) 

That is, in any state, we always want to go left. Then, let us assume that the transition probability is also deterministic, that is
(20) 

That is, whenever we are in the state
Our Bellman equation for the state
(21) ![\begin{align*}v_{\pi}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-eddf54a1bc7c3f52c1d4af965f67afa4_l3.png "Rendered by QuickLaTeX.com")

we only have a single action LEFT, and we only have a single next state
(22) ![\begin{align*}v_{\pi}(s)= \pi(LEFT|s)p(s',r|s,LEFT)[r(s,s',LEFT)+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-999c5a7ffed1deca8c45dd00d60e9bc0_l3.png "Rendered by QuickLaTeX.com")

On the other hand, by using the conditional probability theorem 

(23) 

Taking all these things into account, we obtain
(24) 

So the value function in the state
(25) 

since 



(26) 

Similarly, we have
(27) 

We can see that the value functions at certain states are simply discounted returns! This is because the system is purely deterministic!
Meaning of the value function- grid world case:
Let us now go back to our grid world example that we show again in the figure below.


Let us again introduce the following assumptions
- Rewards obtained at a certain destination state are deterministic, that is

- The policies for the actions UP,DOWN, LEFT, RIGHT have equal probability of

(28)

For other boundary states, the actions that will cause to hit the boundaries of the grid have zero probability (for example, actions UP and RIGHT in state 0 have a probability of 0). - The transition probabilities for every action in the state
(29)





For simplicity, let us construct the state value function for the state 0. The Bellman equation for the state value function is
(30) ![\begin{align*}v_{\pi}(s) & = \sum_{a} \pi(a|s) \sum_{s'}\sum_{r}p(s',r|s,a)[r+\gamma v_{\pi}(s')]\end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-a807a59bf07244bb3d7a2cebc444c54e_l3.png "Rendered by QuickLaTeX.com")
Generally speaking, we have 4 actions. However, in state 0, we only have two possible actions LEFT, and DOWN. Consequently, a=LEFT, DOWN. Then, the next states are 1 and 3. That is, s’=1,3. Then, we have
(31) 

And, we only obtain a unique and deterministic reward
Consequently, the Bellman equation of the value function is
(32) ![\begin{align*}& v_{\pi}(0) =\pi(RIGHT|0)p(1|0,RIGHT)[r+\gamma v_{\pi}(1)] \\& +\pi(RIGHT|0)p(3|0,RIGHT)[r+\gamma v_{\pi}(3)]\\& + \pi(LEFT|0)p(1|0,LEFT)[r+\gamma v_{\pi}(1)] \\& + \pi(LEFT|0)p(3|0,LEFT)[r+\gamma v_{\pi}(3)] \end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-48abc4e30b867f39c84d8d5ed2167602_l3.png "Rendered by QuickLaTeX.com")

The last equation can also be written as follows
(33) ![\begin{align*}& v_{\pi}(0) =\\& = \pi(RIGHT|0)[p(1|0,RIGHT)[r+\gamma v_{\pi}(1)]+p(3|0,RIGHT)[r+\gamma v_{\pi}(3)]] \\& + \pi(LEFT|0)[p(1|0,LEFT)[r+\gamma v_{\pi}(1)]+p(3|0,LEFT)[r+\gamma v_{\pi}(3)]] \end{align*}](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-15390efb9a8bf476c1439bb97e03b3c3_l3.png "Rendered by QuickLaTeX.com")

The Bellman equation of the value function has a graphical interpretation that is called a backup diagram. The backup diagram for the state is shown in the figure 6 below.


We start from the leaves. Every leaf node represents the term 

![p(s'|s,a)[r+\gamma v_{\pi}(s')]](https://aleksandarhaber.com/wp-content/ql-cache/quicklatex.com-26c39a58b2e5df4eb7b8de139c318057_l3.png "Rendered by QuickLaTeX.com")




On the other hand, we can construct the backup diagram as follows. Start from the state
One very important observation can be made by analyzing the equation (33). Namely, this equation represents a weighted average of the terms